[CS294 - 112 정리] Lecture11 - Model-Based Reinforcement Learning
in Reinforcement learning / Reinforcement learning on Cs294
Table of Contents
- Overview
- Today’s Lecture
- Model-based reinforcement learning
- Summary
- Local models
- Real problem
- Digression: dual gradient descent
- Trust regions & trajectory distributions
- Reference
Overview
- 지난 강의:
- 알고있는 system dynamics(e.g., physics)를 통해 backpropagating(or planning)하여 자체적으로 좋은 action을 선택.
- 이번 강의: dynamics 를 모른다면 어떻게 해야할까?
- Fitting global dynamics models (“model-based RL”).
- Fitting local dynamics models.
- 다음 강의:
- Image들과 같이 높은 차원 observation에 대해 dynamics를 학습.
- 다다음 강의:
- Optimal control의 목표를 가지고 NN policies를 학습하기 위해 optimal control과 policy search 결합.
Today’s Lecture
- Overview of model-based RL
- Model만 학습
- Model & policy 학습
- 어떤 모델을 사용할 수 있을까?
- Global model & local model
- Local model 및 trust region 학습
- Goals:
- Model-based RL의 용어 및 구조 이해
- Model-based RL에서 사용할 수 있는 모델 종류 이해
- Model learning의 실제 고려사항 이해
- But, Deep RL은 이후에 다룰 예정.
Model-based reinforcement learning
Why learn the model?
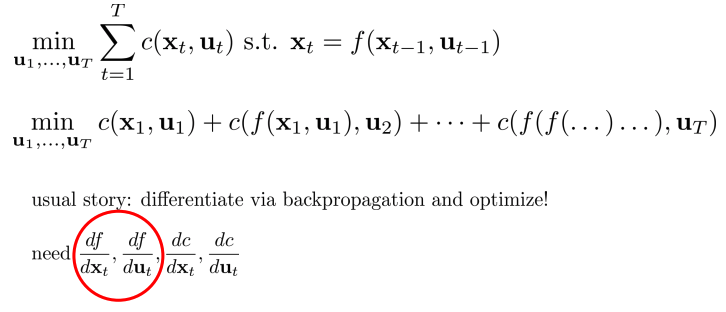
- 아래의 빨간원으로 표현되는 미분 값을 알면 model을 이용할 수 있다.
- 즉, Deterministic case에서 \(f(s_t, a_t) = s_{t+1}\)을 안다면, 이전에 배웠던 optimal control와 같은 방법(planning) 들을 사용할 수 있다
- 다른 경우: stochastic case, \(p(s_{t+1} \mid s_t, a_t)\).
- Data로부터 \(f(s_t,a_t)\)을 학습하고, 이를 통해 planning

- Model-based reinforcement learning version 0.5:
- Base policy \(π_0 (s_t, a_t)\) (e.g., random policy)을 구동하여 \(D = {(s, a, s’)_i}\) 수집.
- \(\sum_i \left \| f(s_i, a_i) - s' _i \right \|\)를 최소화하여 dynamics model f(s, a) 학습.
- Deterministic case: 위와 같이 regression loss(MSE).
- Stochstic인 case: maximizing the likelihood(log \(p(s' \bar a,s)\)).
- Gaussian distribution인 경우에는 동일함.
- Action을 선택하기 위해 f(s, a) 를 통해 planning.

1, 2 과정은 supervised learning과 유사하며, 3 과정은 지난번에 했던 내용(LQR, iLQR, DDP 사용).
- MBRL 0.5은 잘 동작?
- 그래도 많은 영역에서 동작!
- 본질적으로 system identification(입력과 출력을 모델링하는 것, physical parameters를 찾는것)이 classical robotics에서 동작하는 방식 이므로 동작.
- 좋은 base policy를 설계하기 위해서 어느정도 주의를 기울여야한다.
- 만약 물리학의 지식을 사용하여 dynamics representation을 수작업으로 처리하고 몇 가지 parameter를 fitting하면 특히 효과적.
- 그러나, 일반적으로는 동작하지 않음.
- Imitation learning에 대해 언급했던 것과 동일한 이유(Distribution mismatch 문제)
- 예제 목표: 산의 정상으로 가는것.
- Base policy(π0) = random (빨간 선, 비탈길에서 걸음)
- Dynamics model 학습
- 오른쪽으로 갈때 정상으로 올라감
- 항상 true는 아님.
- 주어진 데이터를 기반으로 학습이 진행되기 때문.
- Why this problem(왜 추락할까)?
- Base policy는 some distribution \(P_{π_0}(s_t)\)로부터 data를 제공
- 최종 \(p_{π_f}(s_t)\)와 base \(p_{π_0}(s_t)\)의 distribution이 동일하지 않음.
- \(p_{π_0}(s_t)\)를 아무리 잘 generlization해도 보장할 수 없다.
- Base policy는 some distribution \(P_{π_0}(s_t)\)로부터 data를 제공
- 예제 목표: 산의 정상으로 가는것.
- Imitation learning에 대해 언급했던 것과 동일한 이유(Distribution mismatch 문제)
- 새로운 training data를 활용 해 supervised learning을 통해 low generalization error을 가질 수 있다.
- Arbitrary distribution으로 하게되면 보장할 수 없음.
- 이러한 것이 DAGGER와 유사.

Distribution mismatch 문제는 모델 class가 더욱 expressive할수록 더욱 악화(exacerbated).
Can we do better?
- 성능 향상을 위해, 이전의 문제였던 distribution mismatch를 해결
- \(p_{\pi_F}(s_t)\)에서 data를 수집하여 \(p_{\pi_o}(s_t) = p_{\pi_f}(s_t)\) 조건 추가
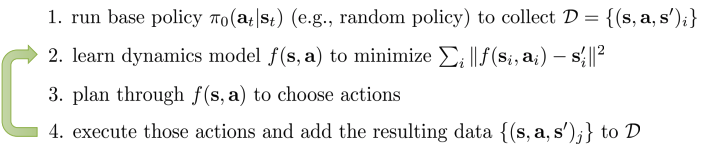
- Model-based reinforcement learning version 1.0:
- Base policy \(π_0 (s_t, a_t)\)(e.g., random policy)을 구동하여 D = { \((s, a, s’)_i\) } 수집.
- \(\sum_i \left \| f(s_i, a_i) - s' _i \right \|\)를 최소화하기 위해 dynamics model f(s, a) 학습.
- Action을 선택하기 위해 f(s, a)를 통해 planning.
- 위의 action을 실행하고 결과 data {\((s, a, s’)_j\)} 를 D에 추가

- 문제점: 만약 실수를 하게 된다면(우리가 원한 state로 도달하지 않을 경우)?
- Small error라도 축적되면 재앙이됨.
- 전진으로 가는 것인데 조금씩 왼쪽으로 가게되면 많이 벗어나게됨
- 해결책: Model error를 replanning.
- Small error라도 축적되면 재앙이됨.

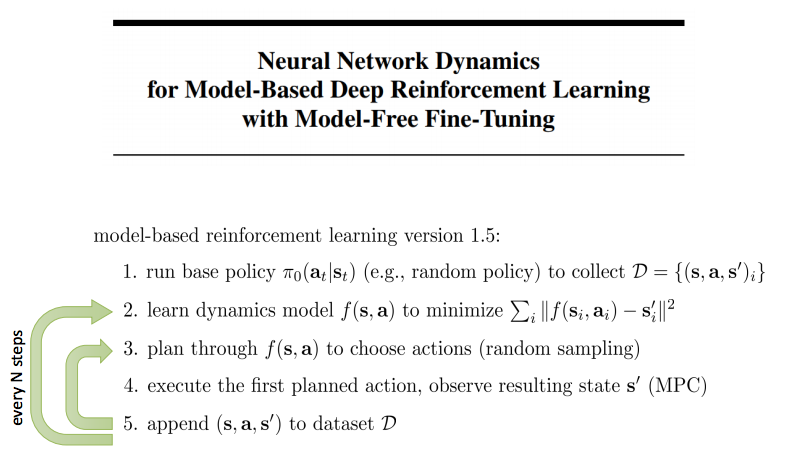
- Model-based reinforcement learning version 1.5: 1. Base policy \(π_0 (s_t, a_t)\)(e.g., random policy)을 구동하여 D = { \((s, a, s’)_i\) } 수집. 2. \(\sum_i \left \| f(s_i, a_i) - s' _i \right \|\)를 최소화하기 위해 dynamics model f(s, a) 학습. 3. Action을 선택하기 위해 f(s, a)를 통해 planning 4. 첫번째 계획된 action을 실행하고, 결과 state s’를 관측(MPC) * Generate a new plan which will hopefully correct that mistake
* MPC가 유용한 이유는 모델이 완벽하지 않아도 replanning하여 policy의 실수에 대해 수정해준다. 5. (s, a, s’)를 dataset D에 append

- Replan하는 방법(How to replan?).
- Replan을 할수록, 각 개별 완벽한 plan은 덜 필요하게 됨.
- 짧은 horizon 사용 가능
- 심지어 random sampling도 종종 잘동작.
- huge long plan을 생성할수록 잘 동작

- 단점: That seems like a lot of work…, 많은 연산 필요 - 3 step(replanning)
- But, 다음주에 우측하단 방법을 사용하여 policy를 distill(증류)시킴(demonstration에서 supervising)
- 이를 학습시키고 test할 때는 cheaper policy 사용

- 지금까지는 모델을 학습하고 optimal control 기법을 이용하여 action 선택(computational power가 expensive)
- Model-based reinforcement learning version 2.0:
- Policy를 backpropagate해서 직접 학습 할 수 있을까?
- f(s,a)를 backpropagate해서 policy optimization (3번 과정, second optimization)
- 아래의 그림에서는 deterministic이라고 가정,
- Stochastic경우, reparameterization trick 을 이용하여 generalization.
- 그러나, NN은 종종 잘 동작하지 않음.
- Vanishing gradient 문제.
- recurrent NN을 사용하여 해결 가능.

Summary

Case study: model-based policy search with GPs(version 2.0, 2011)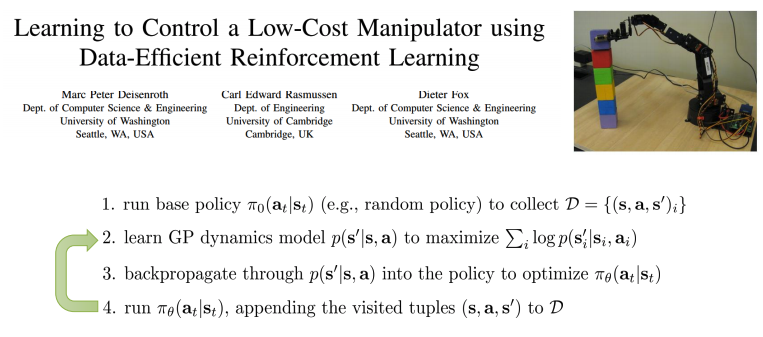
- Base policy \(π_0 (s_t, a_t)\) (e.g., random policy)을 구동하여 D = { \((s, a, s’)_i\) } 수집.
- GP를 사용하여 Bayesian nonparametric model 을 사용
- Good uncertainty estimate
- \(\pi_\theta(a_t \mid s_t)\)을 최적화하기 위해서 \(p(s’ \mid s, a)\) 을 통해 policy로 back propagate
- Contribution: backpropagation은 fairly tractable 및 stable하게 만듬.
Step 3에 대해 자세히 알아보자
- Stochastic model
- \(p(s_t)\) 가 주어지면, \(p(s_{t+1})\)을 계산하기 위해 \(p(s’ \bar s, a)\) 사용 (state marginals 계산하기 위해 approximation을 formulate)
- 만약 current state marginal \(p(s_t)\) 가 Gaussian이면, closed form으로 (non-Gaussian distribution) 을 얻을 수 있다.
- Moment matching 을 사용해서 non-Gaussian 을 Gaussian \(p(s_{t+1})\) 으로 projection.
- The other property:
- 만약 reward가 nice하고 p(s)가 Gaussian이라면, \(E_{s \sim p(s)}\)r(s)은 easy.
- 많은 함수가 있으며, Gaussian하에서 expression에 대한 analytic closed-form expression을 가진다(quadratic function)
- \(\sum_t E_{s \sim p(s_t)}[r(s_t)]\)을 쓰고 미분*
- Expected reward의 합을 미분.
- \(p(s_t)\) 가 주어지면, \(p(s_{t+1})\)을 계산하기 위해 \(p(s’ \bar s, a)\) 사용 (state marginals 계산하기 위해 approximation을 formulate)
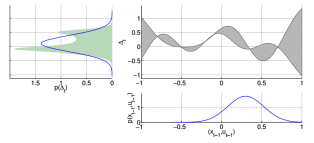
- Green: prediction, 그에 따라 gaussian approximation
사용가능한 모델 종류(What kind of models can we use)?
- GP를 model based rl에서 많이 사용
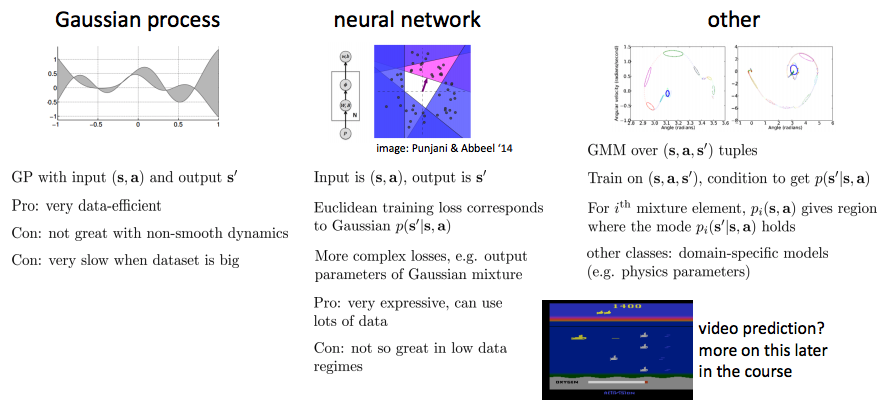
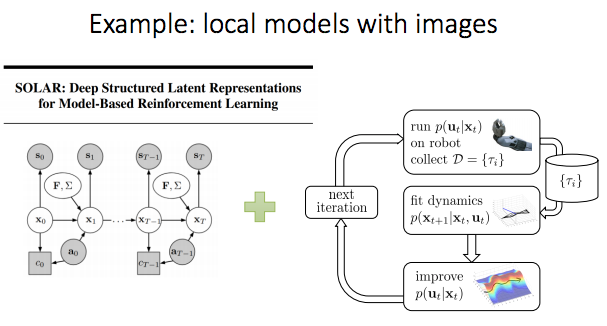
지금까지는 low dimension에 관련해서 진행, image와 같은 high capacity model의 경우는 다음 번에 다룰 것.
Question: policy와 model의 approximation을 공유하는 것은 어떨까?
- 전혀 다른 것이므로 기본적으로 시도하기에 적합하지 않음.
HW4와 밀접한 연관이 있는 것:
- Dynamics model은 NN으로 표현.
- Mujoco 벤치마크.
The trouble with global models
- Global model: Big neural network에 의해 나타나는 \(f(s_t, a_t)\)
- 우리의 목표는 모든 world의 dynamics를 정확하게 모델링 하는 것.
- Model이 erroneously optimistic인 곳을 planner(or policy)가 찾아 낼 것.
- Planner는 모델에 따라 최적화됨.
- 비록 정확하지 않은 (or 실수로든) 모델이 High reward를 받기 위해 생각하는 부정확한 어떠한 곳라도 planner는 행동하게 됨.
- 좋은 solution에 수렴하기 위해서 대부분 state space에서 매우 좋은 model을 찾아야한다.
- 이번 강의에서는 하나의 solution만 다룸.
- 일부 작업에서, global model은 학습하고자 하는 behavioral skill(policy)보다 더욱 복잡하다.
- 물리적 현상은 cup에서 손가락의 contact, 물의 출렁거림은 복잡.
- But, 행동(policy)은 그냥 물컵을 holding하면 됨.
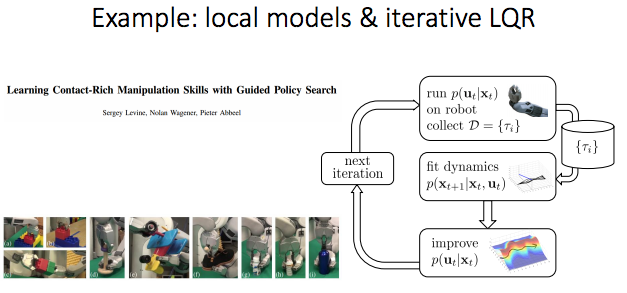
Local models
- 처음은 dynamics(f)를 모르는 상태이므로 학습을 필요 로 한다.
- 그러기 위해서는 \(\frac{df}{dx_t}, \frac{df}{du_t}\)을 알아야 한다(Talyor expansion을 이용하여 근사).
- 매 time step, policy(or trajectory)에 따라 linear regression 방법 등으로 fitting.
- 아래의 그림은 5개의 경로가 존재하며, state space의 진행과정들(trajectories)을 보여줌
- 이 경로를 매 tim estep마다 linear approximation
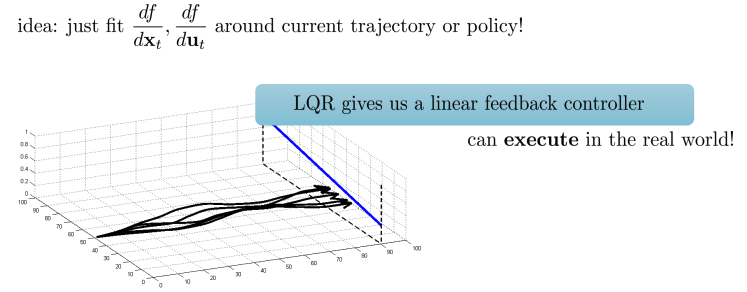
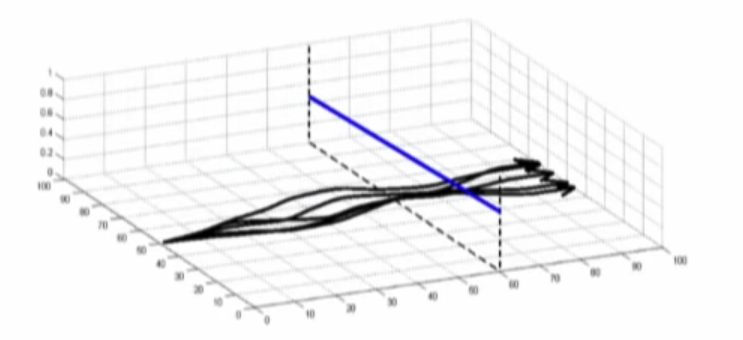
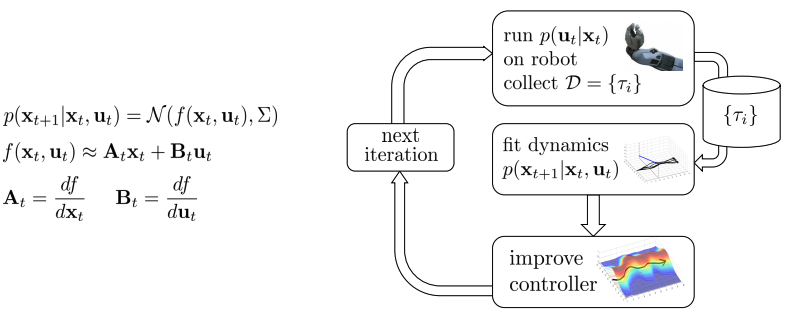
- Some trajectories를 수집하여 linearized dynamics(\(\frac{df}{dx_t}, \frac{df}{du_t}\))을 fitting.
- Dynamics는 Gaussian noise 고려
- Dynamics는 linearization을 통해 approximation
- A, B는 미분하여 구하게 됨.
- Local이라고 말하는 이유는 LQR을 사용하기위해서 dynamics를 어떤 지점에서 선형근사 하기 때문이다. 이것은 global하게 동작하지 않는다.
- 아래의 구조는 basic idea
- 몇 개의 issue가 존재.
- 어떤 controller를 사용하여 right(옳은) data를 얻을 지.
- 아래에서 다룸.
- Global하게 다뤄지지 않고 있기 때문에, local을 벗어나면 발산하는 문제를 해결해야함.
- 어떤 controller를 사용하여 right(옳은) data를 얻을 지.
- 몇 개의 issue가 존재.
What controller to execute?
- Iterative LQR
- Linear feedback control(closed loop, shooting method)
- Nonlinear를 linear로 근사 시켜 제어(이 과정에서 deviation이 발생)

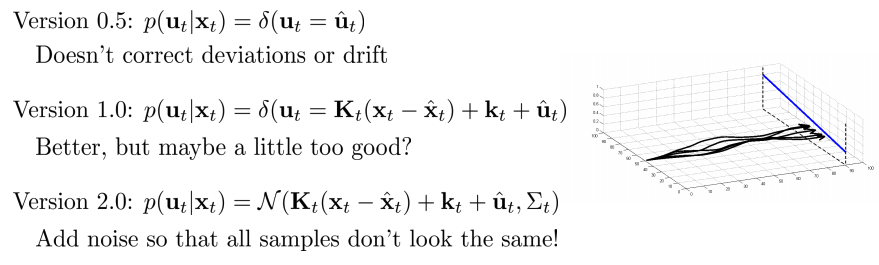
- Version 0.5(deterministic controller)
- Deviation이나 drift가 일치하지 않음(근사후 \(u_t\)로 바로사용함, 조정하지 않음)
- 문제점: not exploration, numerical issue
- Version 1.0
- 성능 조금 향상(근사 후 \(u_t\)로 바로 사용하지 않고 조정했지만, 완벽하게 재구현하지는 못함)
- 문제점: Linear regression을 진행하게 되면, 샘플에 따라 linear fit이 달라짐. 한 군데에 몰려있으면, 근사가 정확하지 않음 -> 노이즈를 추가하여 spread 필요
- (deterministic경우 linear regression이 잘 동작하지 않음)
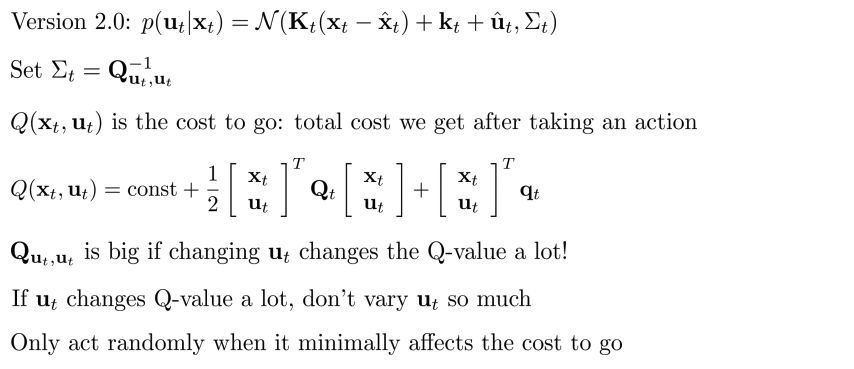
- Version 2.0
- 모든 sample이 같지 않도록 noise 추가
- 어떻게 노이즈 추가? Heuristic
- 모든 sample이 같지 않도록 noise 추가
- 노이즈를 추가하는 법.
- \(\sum_t Q^{-1}_{u_t, u_t}\)(Intuitive interpretation이면서 theoretical interpretation도 가진다)
- \(Q(x_t, u_t)\)는 cost to go: action을 취한 후에 얻게 되는 total cost.
- Action이 문제가 되지 않은 경우에 더 많은 noise를 주입하여 Q matrix 구성
- \(u_t\)를 변경하여 Q-value은 많이 변하면 \(Q_{u,u}\)는 크다(Q function의 curvature는 매우 sharp하기 때문)
- Cost to go에 최소한의 영향을 줄때만 random하게 행동
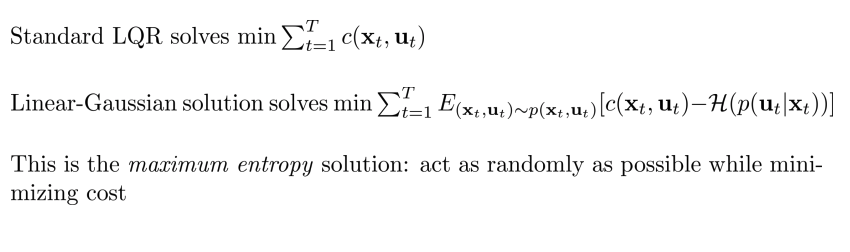
- Standard LQR:
- Total cost를 최소화, \(\sum^T_{t=1} c(x_t,u_t)\)
- Linear Gaussian:
- min \(\sum^T_{t=1} E_{(x_t, u_t) \sim p(x_t, u_t)} [c(x_t,u_t) - H(p(u_t \mid x_t))]\)
- Maximum entropy solution: cost를 최소화하며 가능한한 random 하게 행동하는 것.
Local models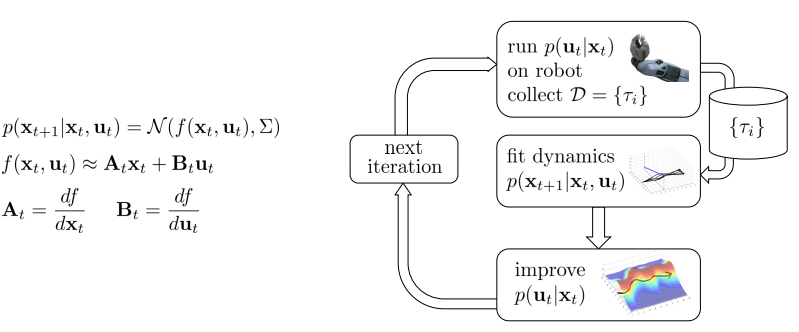
How to fit the dynamics(Dynamics를 어떻게 fitting)?
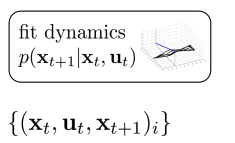
- Version 1.0: linear regression을 사용 하여 각 time step에서 \(p(x_{t+1} \mid x_t, u_t)\) fitting.

- Version 2.0: Bayesian linear regression 사용 하여 p\(p(x_{t+1} \mid x_t, u_t)\) fitting
- 매우 좋은 아이디어는 아니지만, sample이 충분하다면 동작.
- Prior(GP, deep net, GMM)으로 선호하는 global model을 사용(사전지식사용, 실제로 이용은 아님)
Real problem
What if we go too far?
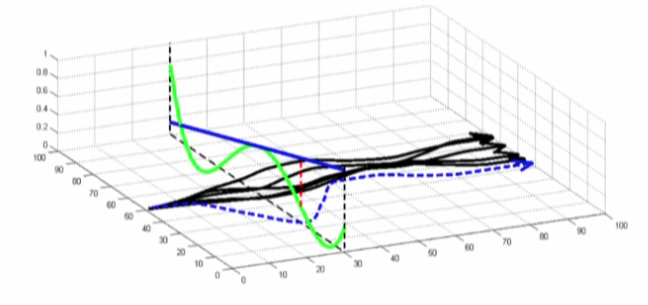
- Linearize된 local model은 small region에서만 정확.
- Policy를 유지하는 constraint를 부과해야한다.
- 초록색: real dynamics(nonlinear), 파란색: linearized estimate of dynaimcs, 빨간색: big error
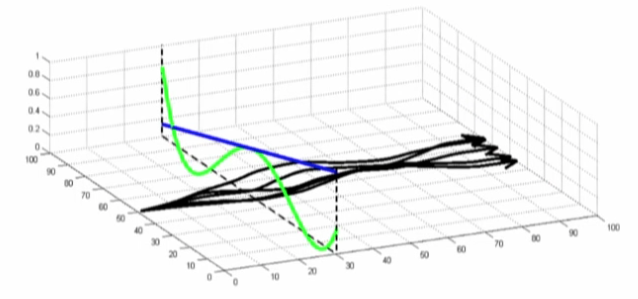
- LQR을 사용했을때 파란 dotted line은 원하는 결과지만, local model이므로 빨간 dotted line이 실제 결과
- 따라서, LQR의 solution에 대한 추가 constraint에 대한 이해가 필요하며 검은 line에 가깝게 유지해야한다.
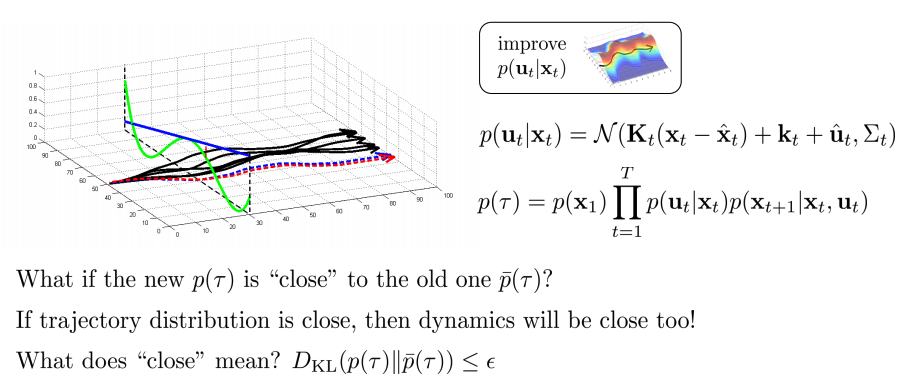
How to stay close to old controller?
- IDEA: Natural gradient와 KL divergence constraint 매우 유사
- KL divergence와 trajectory state, action 간의 관계의 분석
- Controller \(p(u_t, x_t)\) : linear Gaussian,
Trajectory distribution p(τ): big product of policy and dynamics
- 직관:
- old \(\bar{p}(\tau)\)와 가까운 new \({p(\tau)\)라면?
- 만약 trajectory distribution이 가깝다면, dynamics도 가까울 것
- 가깝다라는 것은 무엇을 의미하는가? \(D_{KL} (p(\tau) \mid \mid \bar{p}(\tau)) \geq \epsilon\)
- old \(\bar{p}(\tau)\)와 가까운 new \({p(\tau)\)라면?
KL-divergences between trajectories
- PG에서 trust region과 상당히 유사
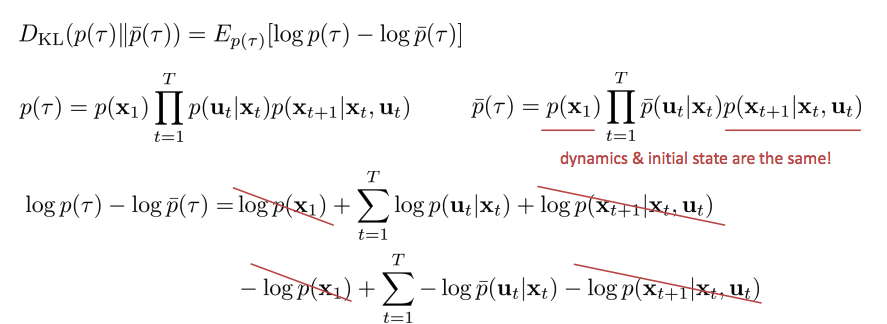
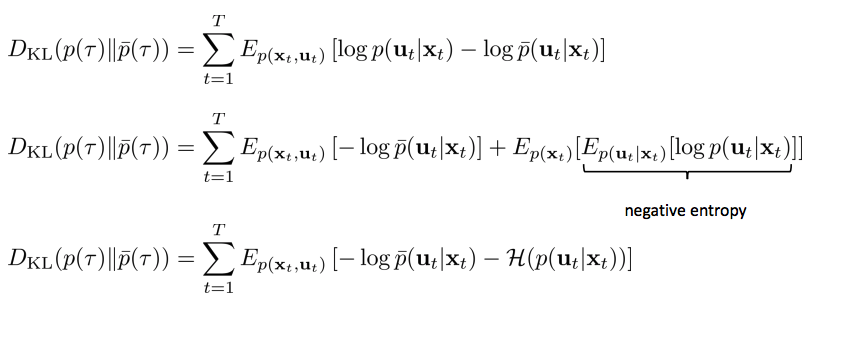
- log\(p(u_t \mid x_t)\)는 새로운 controller를 optimization하는 것.
- State marginal의 expectation으로 동등하게 풀어 쓸 수 있으며 negative entropy이므로 \(-H\)로 대체 가능.
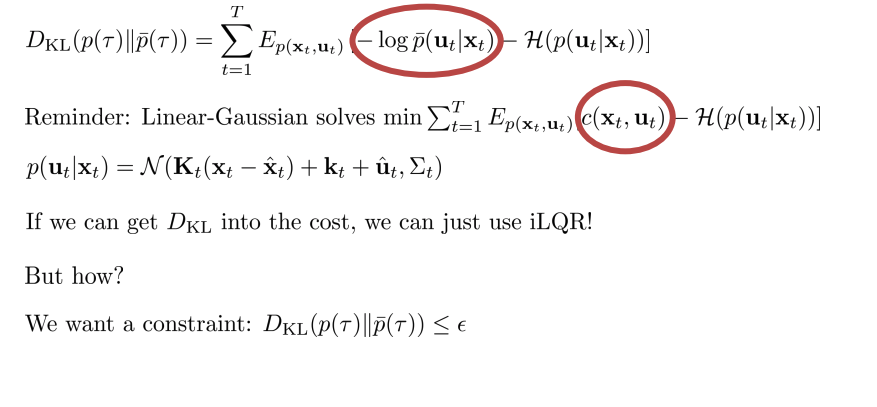
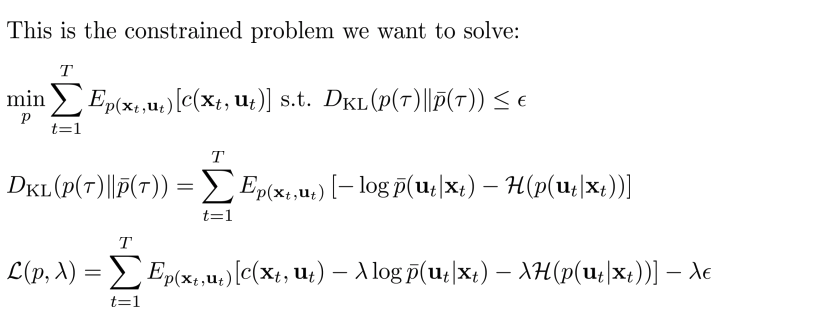
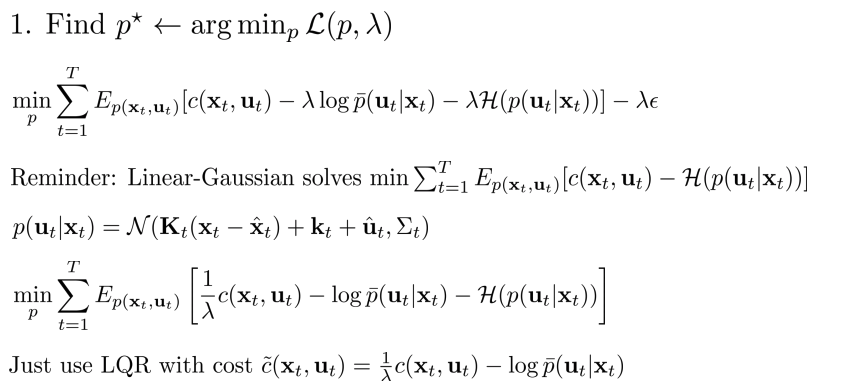
Reminder: Linear-Gaussian 은 \(\sum^T_{t=1} E_{p(x_t,u_t)} [c(x_t, u_t) -H(p(u_t \mid x_t))]\) 를 최소화하는 문제를 풀 수 있다.
\(D_{KL}\)을 cost에 넣을 수 있다면, iLQR을 동작 가능.
- But How? constraint로 추가.
Digression: dual gradient descent
Dual gradient descent
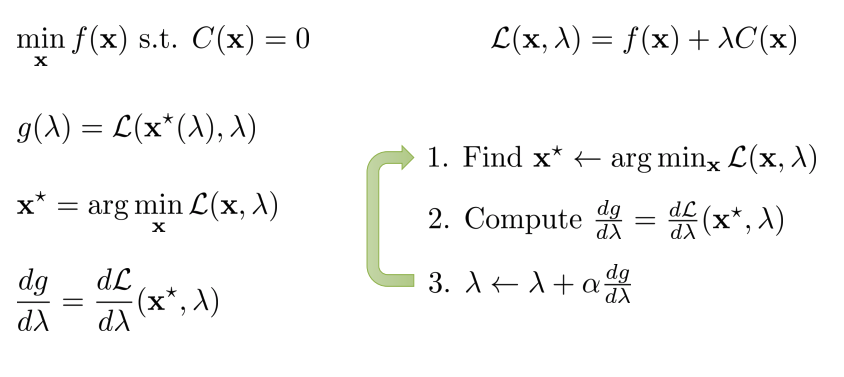
- Constrainted optimization 문제 푸는 법: Lagrangian multiplier 이용하여 dual 문제로 변경하여 solution 찾음
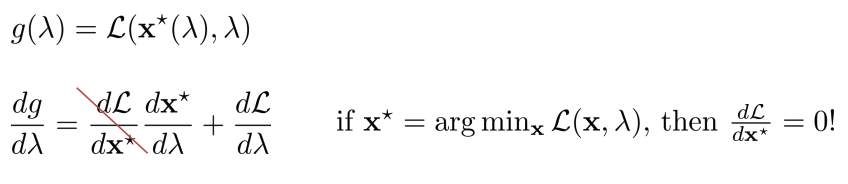
- \(g(\lambda)\): dual function.
- \(\lambda\)를 maximization: constraint optimization문제를 푸는 것.
- Compute the gradient!
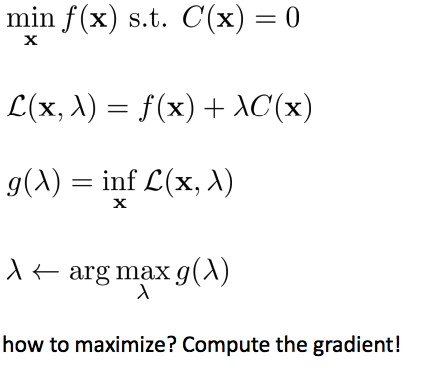
- \(x^* = argmin_x L(x, \lambda)\)에 의해 주어진 dual variable에 대한 Lagrangian을 최소화.
- Gradient step으로 complicated constrainted optimization문제 품.
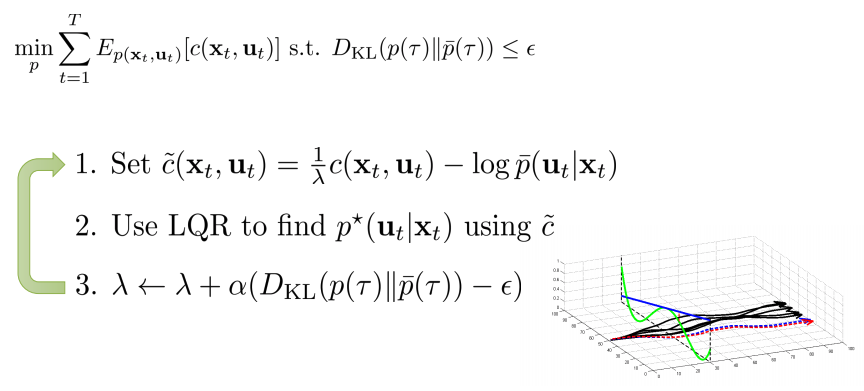
Dual gradient descent with iterative LQR__
- KL divergency constraint를 추가하여 dual gradient descent로 solution을 찾는 과정
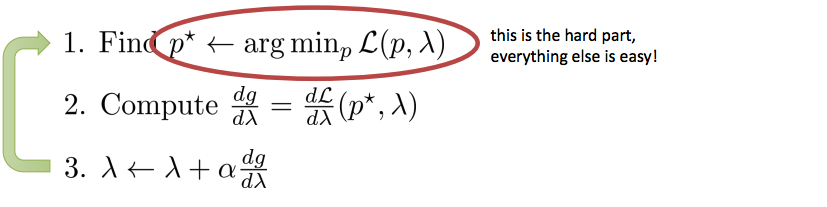
- 1번 부분이 어려운 부분(hard part,everything else is easy)
- Idea: cost를 최소화하는 과정이 이미 LQR에서 이러한 과정을 진행
- cost를 약간 변경하여 사용.
Trust regions & trajectory distributions
- Linear-Gaussian 혹은 더욱 복잡한 것(e.g., NN)이든 , 두 policy 혹은 controller간의 KL-divergences를 bounding하는 것은 실제로 유용.
- Policy들을 KL-divergence를 bounding은 trajectory distribution들간의 KL-divergence를 bounding한 것과 동일.