[CS294 - 112 정리] Lecture4 - Reinforcement Learning Introduction
in Reinforcement learning / Reinforcement learning on Mbrl
Table of Contents
- Today’s Lecture
- Review
- Definitions
- The goal of reinforcement learning
- Algorithms
- Stochastic system
- Review
- Types of RL algorithms
- Reference
Today’s Lecture
- Definition of a Markov decision process
- Definition of reinforcement learning
- Anatomy of a RL algorithm
- Brief overview of RL algorithm types
- Goals:
- definitions & notation 이해.
- 중요한 RL 목적 이해.
- 이용 가능한 알고리즘의 요약.
Review
- Terminology & notation
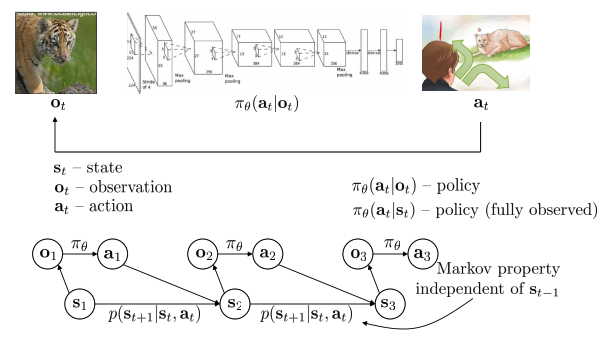
- Sequential decision making 문제는 observation. action. policy를 포함.
- Policy 는 조건부 확률 분포이며, 일반적으로 observation이 주어지고 action이 도출된다. 파라미터화되어 있으며, 이 파라미터를 학습시키는 것이 RL의 목적이다. 바로 파라미터를 학습시키는 PG가 있다.
- 아래의 그래프에서 state 는 Markov property 의미를 만족, observation 은 Markov property를 만족하지 못함.
- POMDPs과 Fully MDPs가 있는데, 일반적으로 fully MDPs로 가정한다.
- Sequential decision making 문제는 observation. action. policy를 포함.
- Imitation Learning
- 전문가의 데이터(observation, action)를 수집하고, supervised learning 알고리즘을 사용한다.
- 위와 같은 behavior cloning접근은 일반적으로 학습이 잘 되지않지만, Dagger를 사용하여 성능을 향상시켰다.
- 전문가의 데이터(observation, action)를 수집하고, supervised learning 알고리즘을 사용한다.
- Reward functions
- 전문가의 data가 없는 경우에, 어떻게 하면 효율적으로 policy를 학습할 수 있을까?
- Reward를 이용하여 action이 좋은지 나쁜지를 찾을 수 있다.
- Reward는 s, a로 구성, r(s, a)
- Reward를 순간이 아닌 전체에 걸쳐 최대화 한다.
- State, action, reward(r(s, a)), transition probability(p(s’\(\mid\)s,a))은 Markov decision process이라 한다.
- MDP는 기본적으로 RL의 world의 정의.
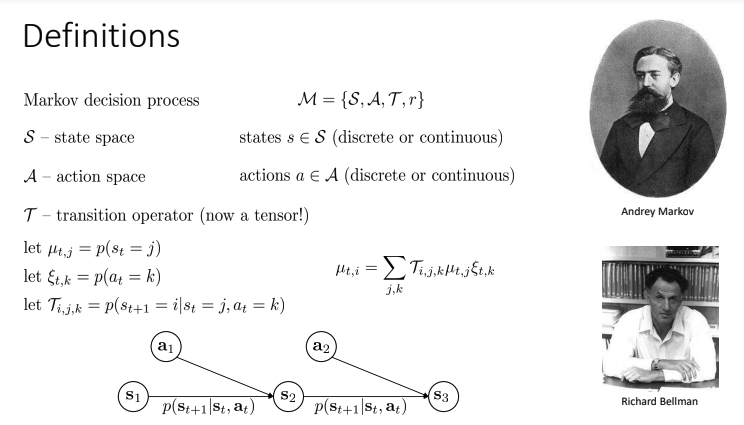
Definitions
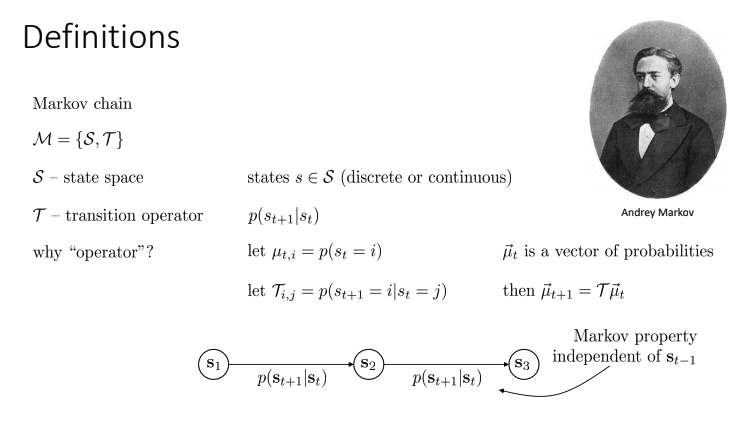
- Markov chain
- \(T\) - trainsition operator라고 한다. 현재 state에서 특정한 state로 가는 확률(조건부 확률분포).
- 왜 operator라고 불리나?
- Discrete space에서 \(T\) 는 행렬이고, 확률의 vector(\(\mu\))에 대해 operator처럼 행동.
- p는 state distribution이며, 0보다 큰 값을 가진다.
- \(T _{i,j}\) matrix는 \(p(s_{t+1} \mid s_t)\), \(s_t\)에서 \(s_{t+1}\)로 전이하며, 간단한 linear equation으로 Markov chain forward \((\overrightarrow{\mu_{t+1}} = T \overrightarrow{\mu_t}\) ) 표현.
- 왜 operator라고 불리나?
- Continous space에서는 위와 같이 표현하기 어렵지만, computer에서는 기본적인 이론이 위와 같이 정확하게 동일하게 유지된다.
- Markov property로 인해 \(s_3\)는 \(s_1\)와 독립적.
- \(T\) - trainsition operator라고 한다. 현재 state에서 특정한 state로 가는 확률(조건부 확률분포).
- Markov decision process(MDP)
- Reward, action 개념 도입.
- Action, state가 다음 state를 결정.
- Transition Operator는 tensor(3D) 형태를 가짐.
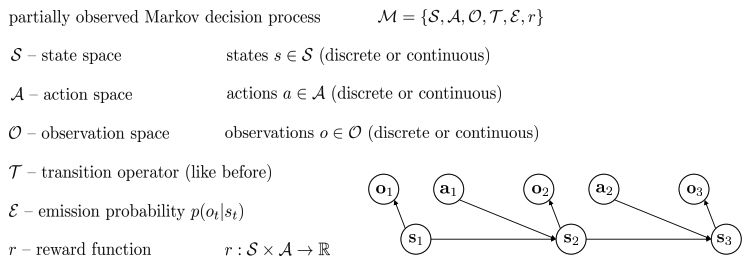
- Partially observed Markov decision process(POMDP)
- MDP의 generalization model.
- Observation, emission probability 도입
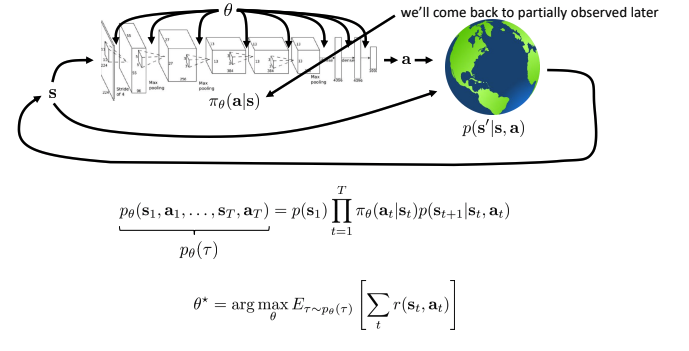
The goal of reinforcement learning
- 목적:
- 보상을 최대로하는 policy(π)의 weight(θ)찾기.
- 파라미터 vector θ* 찾기, trajectory에 걸쳐 보상의 총합의 theta로 유도된 trajectory distribution하에서 expectation의 argmax.
- \(p(s' \mid s, a)\) 는 일반적으로 모르는 상태이며, 확률이고 다음 state을 지정.
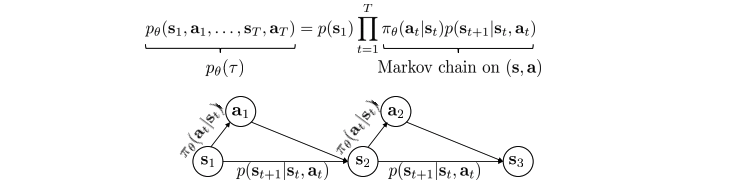
- Trajectory(sequence, τ)는 state, action으로 구성, chain rule을 이용하여 policy와 transition operator를 product로 표현.
- Expectation을 사용하는 이유 : parameter vector인 state, action가 random variable이기 때문이고, 여기서의 분포를 사용.
- 아래의 항등식이 중요.
- Markov chain를 분석하는 방법에 사용
- Stationary distribution 찾는 방법

두 MDP 경우를 살펴보자.
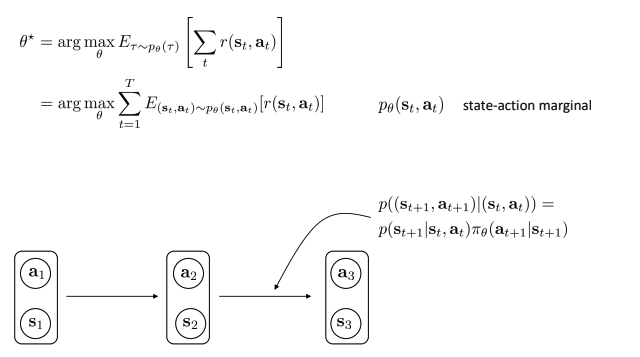
- Finite horizon case: state-action marginal:
- Expectation을 내부로 넣으면서, trajectory를 (s, a) pair 로 변경. 실제로 p(s,a)를 아는 것은 힘들지만(나중에 다룸), 매 time step에서 reward를 계산하기 위한 공식을 정의하기 위해 진행.
- 위에서 언급했듯, \(\tau\) 는 state와 action의 trajectory \(s_1,a_1,…,s_T,a_T\) 인데, Markov chain에서 \(\tau\)는 결국 transition probability 와 policy에 따라 결정.
- 즉, state-action간의 transition probability 는 \(p((s_{t+1}, a_{t+1}) \mid (s_t, a_t)) = p(s_{t+1} \mid s_t,a_t) \pi_\theta(a_{t+1} \mid s_{t+1})\) 이고, \(p_\theta(s_t, a_t)\) 로 표현 = state-action marginal.
- Infinite horizon case: stationary distribution:
- T가 무한대로 간다면?
- Mild 가정 아래 Markov chain은 stationary distribution safety를 유도할 수 있다.
- 안정화시키는 것은 transition인 T가 k step이후에는 우측 하단처럼 될 수 있다.
- Mild 가정 아래 Markov chain은 stationary distribution safety를 유도할 수 있다.
- p(s,a)가 stationary distribution에 수렴하는가?
- Stationary distribution: 시간이 지남에 따라 Markov chain에서 변하지 않은채 남아 있는 확률 분포.
- Eigen value = 1, mild regularity condition(가벼운 규칙성 조건)에 있음.
- 결국에 특정값에 수렴 하게 될 것.
- T가 무한대로 간다면?
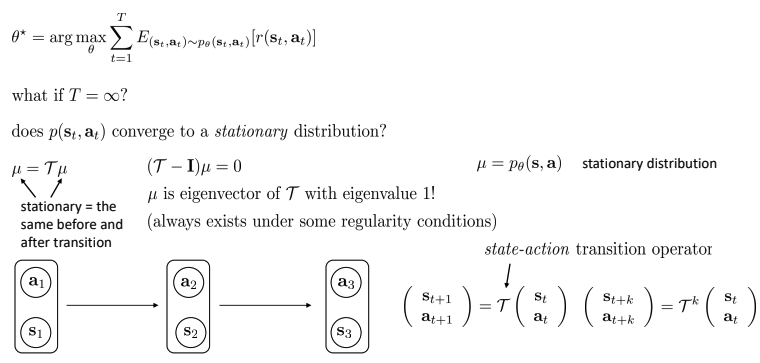
- 약간 수정됨(T가 무한대로 가기 때문에, T를 나누지만 stationary distribution으로 인해 소거됨)

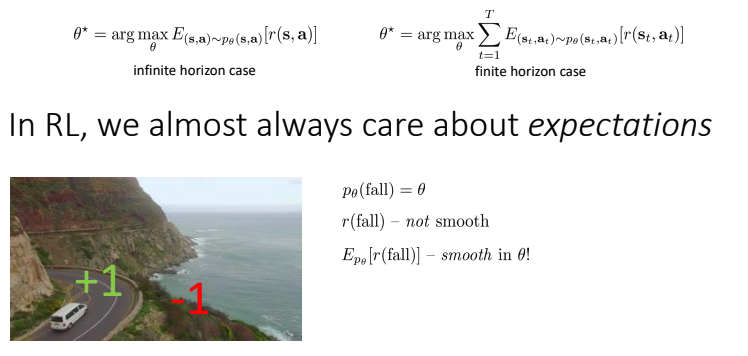
- Expectations and stochastic systems
- RL에서는, expectation에 대해 항상 고려.
- Reward function는 not smooth, not differentiable.
- Expectation을 추가하여 smooth하게 만듬.
Algorithms
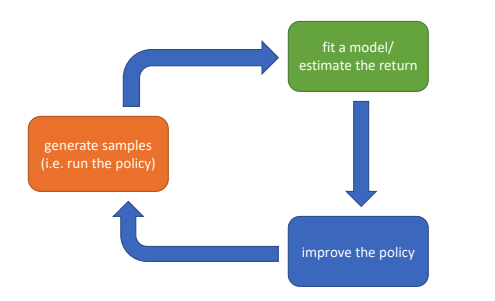
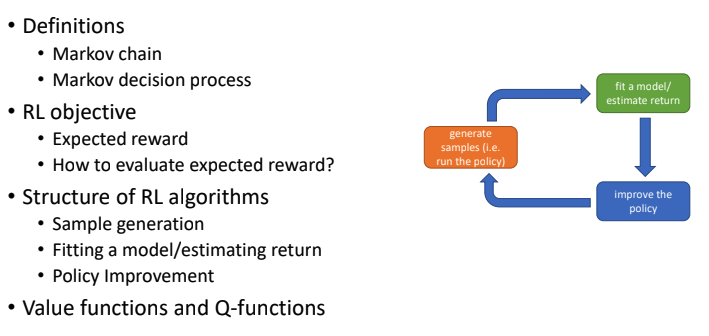
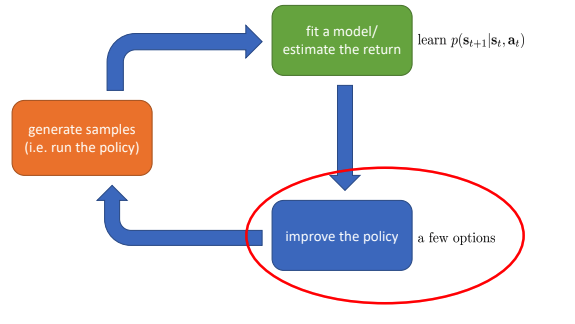
- RL 알고리즘의 구조
- Sample 생성(즉, policy를 토대로 agent 행동)
- Fit a model/ estimate the return(sample들에 대한 평가, return 추정)
- Policy 향상(policy를 업데이트하는 학습방식)
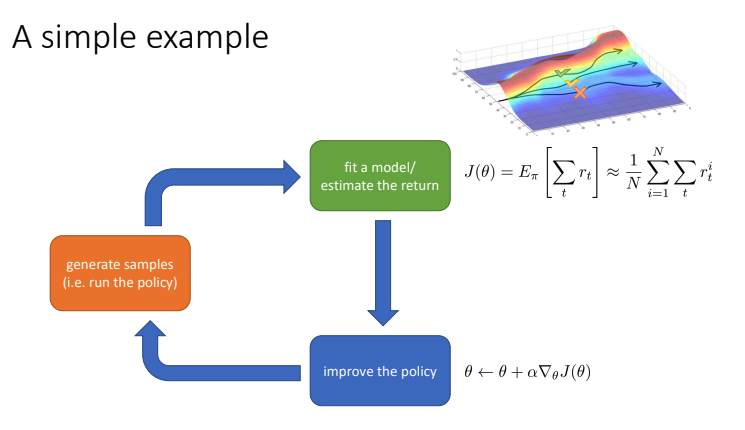
- Policy gradient:
- Policy를 direct update.
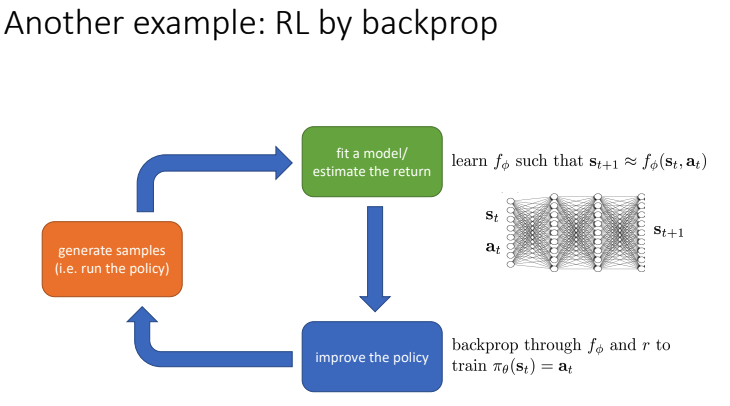
- Model based learning:
- State, action이 들어왔을 때, 다음 state 출력으로 가지는 예측 모델 \(f_\phi\)를 학습한다. \(f_\phi\)가 예측한 다음 state와 실제 다음 state간의 loss를 줄이도록 학습(Model-based RL).
- Which parts are expensive?
- [주황색 박스] : MuJoCo등으로 시뮬레이션을 돌리는 경우는 현실의 시간보다 충분히 빠르게 학습을 돌릴 수 있으므로 큰 문제가 안되지만, 실제로 자율주행이나 로봇 등을 적용할 때 학습하는 경우는 시간이 많이 소요된다.
- [초록색 박스] : reward를 계산하는 것은 쉽고 빠르게 구현가능하지만, 다음 state를 예측하는 모델 f를 학습하고 최적화하는 것은 오래걸린다. 물론 알고리즘에 따라 다르긴 하다.
- [파란색 박스] : model f나 reward을 통해 \(\pi_\theta\)를 학습, 알고리즘에 의존.
- Why is this not enough?
- 오직 deterministic dynamic, policy만 다룰 수 있다(?).
- Gradient의 연산을 통해 학습하기 때문에 연속적인 state와 action만 다룰 수 있다.
- Gradient vanishing 문제 등 최적화에 대한 문제들이 있다.
Stochastic system
- Stochastic system으로 동작하게 하는 법
- Conditional expectations
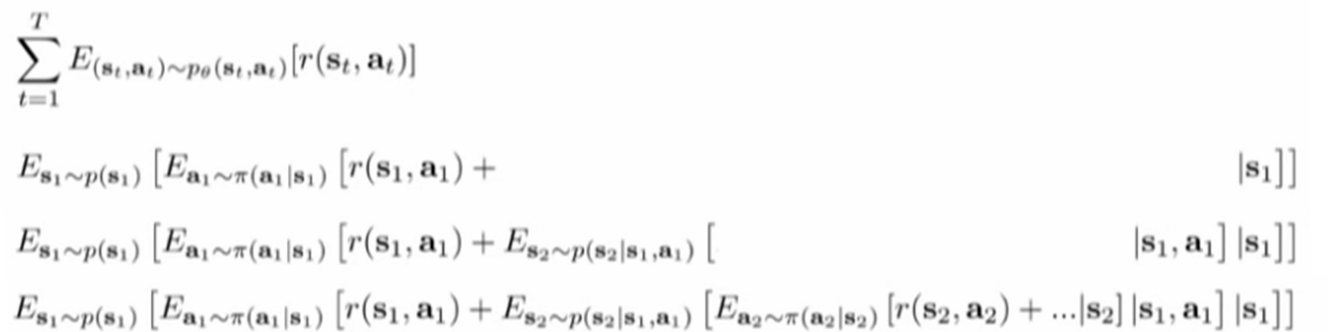
- Time step \(T\)까지 진행되고나면 trajectories 따른 reward \(r(s_1,a_1),r(s_2,a_2),r(s_3,a_3)...\) 을 반환받고 그에 맞게 학습.
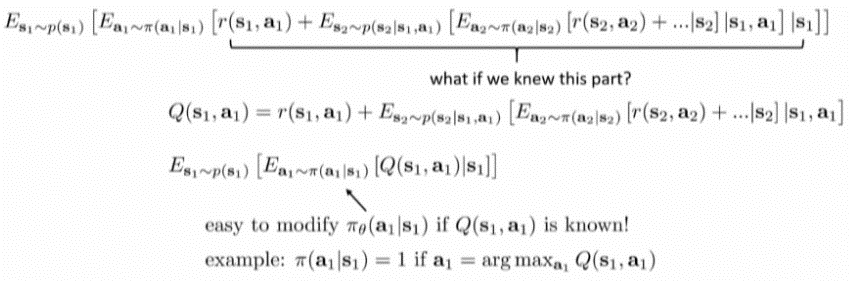
- 앞으로 받을 보상을 예측할 수 있다면?
- time step T까지(trajectory) 기다릴 필요없이 바로 policy를 앞으로의 보상에 맞게 학습 할 수 있을 것이다.
- 즉, 앞으로의 보상이 최대가 되는 action \(a_1\)이라 할때, policy가 \(a_1\)을 내뱉을 확률을 \(π(a_1 \mid s_1)=1\)이다.
- 이 때, 앞으로 받을 보상을 예측해주는 함수를 Q-function.
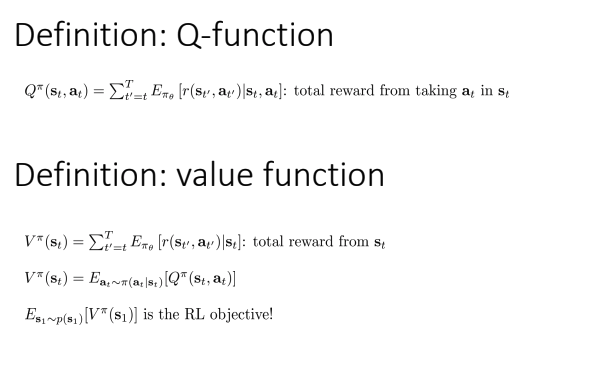
- Q-function
- s에서 a를 취해 얻는 전체 보상의 합.
- Value function
- s에서 얻는 전체 보상의 합.
- Q-function으로 표현될 수 있음(V는 모든 action에 대한 Q의 합의 expectation(=average)).
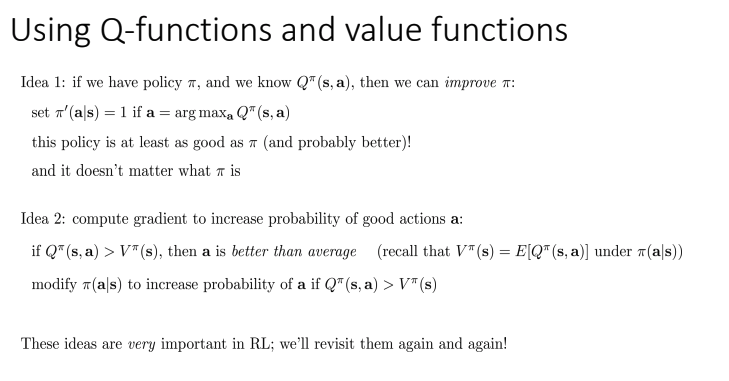
- 만약 \(Q_pi(s_t, a_t) > V _\pi (s_t)\)라면, action \(a_t\)는 다른 action들에 비해 평균 이상으로 좋은 action 이다. 이렇게 Q값에 기반해서 더 나은 행동을 하도록 policy를 학습할 수 있는 것이다
- Idea1: Q를 안다면 policy 향상
- argmax Q를 이용하여 정책갱신
- 갱신되는 정책은 무슨 정책이든 상관없이 더 좋아질 것.
- Idea2: 좋은 행동 a의 확률 증가하기 위한 gradient 계산.
- Q > V라면 평균보다 좋은 값이다.
- 따라서, 위의 조건의 action에 대해 probability를 높여주면 된다.
- Idea1: Q를 안다면 policy 향상
Review
Types of RL algorithms
- Policy gradient: 직접적으로 아래의 목적함수를 미분
Value-based: (no explicit policy) optimal policy의 value function, Q function을 추정
Actor-critic: 현재 policy의 value function, Q function 추정, policy 향상하기 위해 사용
Model-based RL: transition model 추정, 그리고
- planning을 위해 모델사용(no explicit policy)
- policy 향상을 위해 사용
- Something else
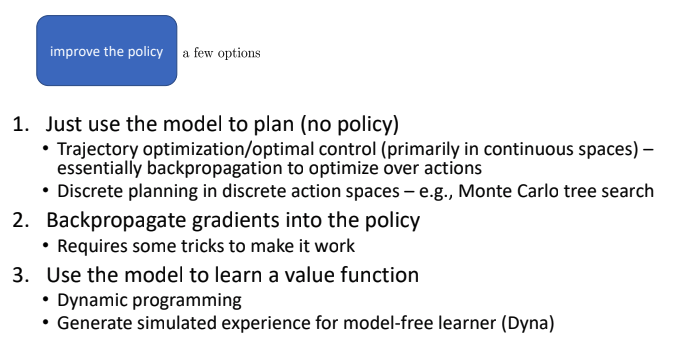
- plan하기 위해 모델 사용(no policy)
- trajectory 최적화/ 최적 제어(우선적으로 continuous space) - 필수적으로 action에 걸쳐 최적화하기 위해 backpropagation
- discrete action space에서 discrete planning - e.g., Monte Carlo tree search
- Backpropagate gradient into the policy
- 동작하기 위해 몇가지 트릭 필요
- Value function을 배우기 위해 모델 사용
- DP
- Dyna
- Trade-off
- 여러가지 강화학습 알고리즘이 있지만, 풀고자 하는 문제의 성격이나 제약조건에 따라 적절한 알고리즘을 선택해야한다. 각각 알고리즘마다 장단점이 있다.
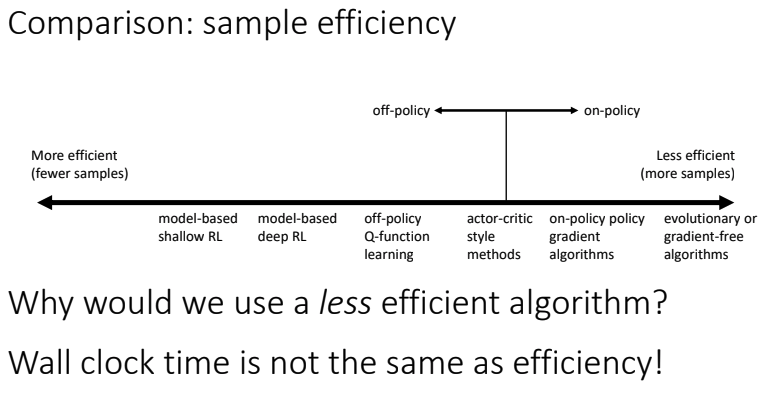
- Comparison: sample efficiency
- 샘플 효율성 = 좋은 정책을 얻기 위해서 얼마나 많은 샘플이 필요한가?
- 가장 중요한 질문: Off policy 알고리즘 ?
- Off policy: policy에서부터 새로운 샘플 생성없이 policy를 향상할 수 있다.
- On policy: 각 time마다 약간이라도 policy가 변하면, 새로운 샘플을 생성해야 한다.
More efficient 한 방법이 항상 더 좋은것은 아니다. simulation 비용이 많이 들지 않는다면, less efficient하더라도 더 나은 성능을 위해 많은 sample을 얻어서 학습하는 것이 효율적일 수 있다.
- Stability & ease of use
- 수렴하는지, 어디로 수렴하는지, 항상 수렴하는지에 대한 이슈다.
- 기존의 supervised learning에서는 gradient descent를 사용하기 때문에 대개 수렴하지만, RL에서는 대체로 gradient descent를 사용하지 않는다.
- Q-learning: fixed point iteration. 단순한 함수에는 수렴하지만, 복잡한 함수에 수렴하는지는 보장되지 않는다.
- Model-based RL: model이 reward에 대해 최적화되는 것이 아니다. 그저 다음 state를 예측하기 위해 학습한다. 더 나은 model이 더 나은 policy를 만들어주는지는 보장되어있지 않다.
- Policy gradient: objective에 대해 직접적으로 gradient descent를 사용하긴 하지만, local optima에 수렴할 가능성이 있다.
Comparison: assumptions
- Full observation or patially observation?
- state를 모두 관측할 수 있는 경우(st=ot)가 있고, 부분만 관측 가능한 경우가 있다. 주로 value function fitting에서 full observability를 가정한다.
- Stochastic or deterministic?
- Dynamic system 이나 policy에 대한 가정으로, stochastic은 분포를 따르긴 하지만 매번 할 때마다 결과가 달라질 수도 있고, Deterministic은 파라미터가 같다면 같은 입력일때 결과가 매번 같다.
- Continuous or discrete?
- Action space나 state space가 연속적인지 불연속적인지에 따라서도 적용하는 알고리즘이 달라진다. 주로 continuous value function learning 이나 model-based RL 에서 continuity나 smoothness를 가정한다.
- Episodic or infinite horizon?
- 하나의(finite) episode로 구성되는 환경인지, 시간제약 없이 끝없이 이어지는(infinite) 환경인지에 따라서도 적용하는 알고리즘이 달라진다. 주로 policy gradient나 model-based RL에서 episodic learning을 가정한다.
- Full observation or patially observation?