[PAPER-Review] Learning From Demonstration
in Reinforcement learning / Reinforcement learning on Mbrl
Table of Contents
- [Learning From Demonstration, Stefan Schaal, 1997]
- [Exploiting Model Uncertainty Estimates for Safe Dynamic Control Learning, Jeff G. Schneider, 1997]
[Learning From Demonstration, Stefan Schaal, 1997]
Abstract
- 1997년도에는 사전지식 없이 처음(scratch)부터 task를 학습하는 것은 어려운 일.
- 그러나, 사람은 드물게 처음부터 학습을 시도.
- Control를 학습하기 위해, 이 논문은 RL의 맥락에서 demonstration으로부터 어떻게 학습을 적용되는 지를 조사
- Demonstration들이 학습을 가속화하는 가능한 area인 task dynamics의 model, Q-function, Value-function, policy를 준비하는 것을 고려. (model, value function등을 사용하여 학습을 가속화 하겠다.)
- 일반적인 nonlinear learning 문제에서 오직 MBRL만 demonstration이후에 상당한 속도향상을 보여주지만, LQR 문제의 경우(선형)에는 모든 method들은 demonstration으로부터 이익을 본다.
- 이 논문에서 시연하는 복잡한 anthromorphic robot arm에서 pole balancing 구현에서는, 실제 signal processing의 복잡함에 직면할때 MBRL은 LQR 문제에 대해 가장 큰 robustness 를 제공.
Introduction
- \(1.\) Inductive supervised learning 방법은 정교함의 높은 수준에 도달.
- Nature에 대한 사전 지식들이나 data set이 주어지면, error criterion를 최소화하여 data로부터 structure를 추출하는 알고리즘의 host가 존재.
- 그러나, Control를 학습하는 방법에서는 task를 학습하는 것은 잘 정의되지 않음
- 여기서, 목표는 policy를 학습하는 것.
- i.e., task를 성취하기 위한 dynamical system으로 유도하는 거나 인지한 state에 반응하여 적절한 행동을 하는 것.
- Task는 일반적으로 임의의 performance index의 관점에서 묘사되기 때문에, 지도하는 방법으로 controller를 학습하는 data를 직접적 학습하는 것은 존재하지 않음
- 더욱 문제가 되는 것은, performance index는 task의 long term 행동에 걸쳐 정의 가 되며 현재 performance에 대해 과거의 행동이 얼마나 좋은지(credit) 안좋은지(blame)를 결정하는 temporal credit assignment 문제가 발생.
- 위와같은 setting(RL에 대해서는 일반적)에서, 처음부터 task를 학습하는 것은 good policy를 찾기 위해서 state-action space의 exploration의 time-consuming amount(소요시간)을 상당하게 요구.
- \(2.\) 반대로 사전 지식 없이 학습하는 것은 인간이나 동물이 거의 취하는 않는 접근
- New task에 접근하는 방법에 대한 knowledge는 이전에 학습된 task에서 transfer 가능 ang/or teacher의 performance로 추출.
- New task를 빠르게 성취하기 위해 다양한 정보로 control을 하는 것은 아직 open questions.
- 이 논문: Demonstration에서 학습을 focus 할 것
- \(3.\) Demonstration에서 학습하는 것: “programming by demonstration”, “imitation learning” teaching by showing”으로 알려짐.
- 목표: 전문가에 의해 assembly task를 로봇하게 단독으로 보여주는 automatic programming process을 시간이 많이 소요되는 로봇의 manual programming을 대체하고자 함.
- 이 논문: RL과 demonstration으로부터 learning이 어떻게 이익이 되는지에 집중
- RL을 2개 카테고리로 분류
- Section2) Nonlinear task에 대한 RL
- Section3) (Approximately) linear task에 대한 RL
- Q-learning, value-function learning, model-based RL와 같은 method는 demonstration으로부터 data에서 이익을 볼 수 있는 방법을 조사.
- Section 2.3, example task, pole balancing은 이를 학습하기 위해 실제 anthropomorphic을 사용.
- 더욱 복잡한 상황에서 demonstration으로부터 학습의 적용가능성 재고려.
Reinforcement Learning from Demonstration
- 두 개의 task는 demonstration에서의 학습을 살펴보는 basis.
- Nonlinear task: pendulem swing-up with limited torque
- (Approximately) Linear task: cart-pole
- 두 task에서, learner는 one-step reward \(r\)이 주어지고, continuous state 및 action 문제로 formulation.
- 각각의 목표는 infinite horizon discounted reward를 최소화하는 policy를 찾는 것
여기서, 왼쪽 eqn: continous time formulation, 오른쪽 eqn: discrete time version. x: n-차원 state vector, u: m차원 입력 vector. \[\begin{aligned} V(x(t)) = \int^{\infty}_t e^{-\frac{(s-t)}{\tau}} r(x(s),u(s)) ds \quad or \quad V(x(t)) = \sum^{\infty}_{i=t} \gamma ^{i-t} r(x(i), u(i)) \end{aligned}\]
- Swing-Up에 대해, teacher는 다른 initial condition에서 시작한 5 개의 성공적 시도를 제공한다고 가정.
- 각각의 시도는 60Hz로 샘플링되는 data vector \((\theta, \dot{\theta}, \tau)\)의 time series로 구성
- Cart-Pole에 대해, 성공적인 balancing의 30초 demonstration을 가지며, data vector \((x, \dot{x}, \theta, \dot{\theta}, F)\)
어떻게 RL을 가속화하기 위해 demonstration이 사용되는 방법은?
The Nonlinear task: Swing-up
- Swing-up에 task에 대해서 Value fucntion(V-function) (Dyer & McReynolds, 1970)을 학습하는 기반으로 하는 RL을 적용하고, 대안적인 방법으로 Q-learning(Watkins, 1989)은 continous state-action space에 대해 아직 limited research를 받음.
- V-function은 scalar reward value \(V(x(t))\) 각 state에 대해 assign하고 다음 consistency equation을 만족:
- 이 방정식은 discrete state-action system; continuous formulation은 (Doya(1996))참조
- Optimal policy: \(u = \pi(x)\), (2)를 만족하는 state x에서 action u를 선택.
- 이 계산은 subsequent state x(t+1)의 knowledge를 포함하는 optimization step를 포함.
- 따라서, controlled system 의 dynamics의 model(\(x(t+1) = f(x(t), u(t))\)) 이 필요.
- Demonstration에서의 학습하는 관점에서는, V-function 학습은 demonstration에서 준비(가공, primed)될 수 있는 3가지 후보를 제공.
- Value function \(V(x)\)
- Policy \(\pi(x)\)
- Model \(f(x,u)\)
V-Learning
- Swing-Up에 대해 demonstration의 benefit을 평가하기 위해서, Doya’s(1996) 에서 제안된 continous TD(CDT) 학습으로 V-learning을 구현.
- V-function 및 dynamics model은 nonlinear function approximator(Receptive Field Weighted Regression-RFWR))에 의해 점차적으로 학습됨.
- NN의 발전이 크지않아 approximator를 다른 방법으로 사용한 것 같음
- Doya’s 방법과 다른 것은 policy \(\pi\) (“actor” as in Barto Barto et al. (1983))의 model를 학습하기 위해 CTD에서 제안된 optimal action을 사용 (RFWR으로 표현됨).
- V-function 및 dynamics model은 nonlinear function approximator(Receptive Field Weighted Regression-RFWR))에 의해 점차적으로 학습됨.
- 다음의 학습 condition들은 경험적으로 실험:
- a) Scratch : 처음부터 value function V, model f, actor \(\pi\) 의 trial by trial learning.
- b) Primed Actor : demonstration에서의 \(\pi\)의 초기 training 이후, trial by trial learning.
- c) Primed Model: demonstration에서 f 의 초기 training 이후, trial by trial learning.
- d) Primed Actor & Model : b) 및 c)에서의 \(\pi\) 와 f 의 priming 이후, trial by trial learning.
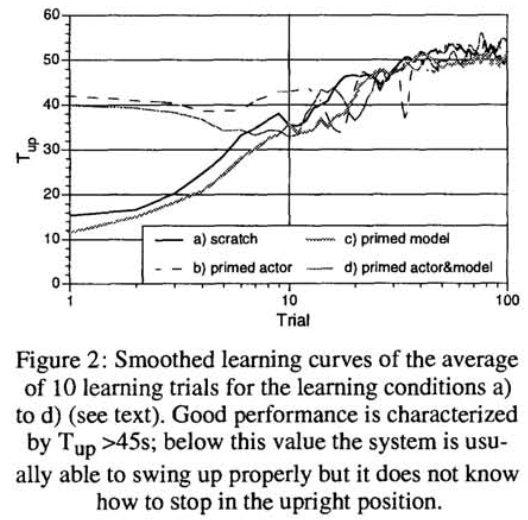
- Fig. 2는 Swing-up 학습 결과
- 각 trial은 60초 지속
- Time \(T_{up}\)은 각 trial 동안 \(\theta \in [-\pi/2, \pi/2]\) 에서 pole이 보내는 시간.
- a) 와 c)를 비교: Demonstration에서의 pole model 학습은 가속화되지 않음.
- 당연한 결과: V-function을 학습하는 것은 model을 학습하는 것보다 상당히 복잡하고, 이것은 학습 과정은 V-function learning에 의해 우선시(dominate)된다.
- 흥미롭게도, demonstration에서 action를 priming은 초기 performance(condition a vs. b)에서 상당한 효과를 가진다.
- 시스템은 pendulum을 pump up 시키는 올바른 방법을 알고 있지만 upright position에서 pendulum을 balancing하기 위해서는, 결국 처음부터 학습하는 것처럼 동일한 시간이 소요.
- 이 행동은 이론적으로 V-function이 전체 state-action space가 densely explore 되어지면 유일하게 정확하게 근사 되어질 수 있기 때문.
- 전체 state-action space에 대한 정보를 알아야 최적의 해를 구할 수 있음
- 만약 demonstration이 전체 state space의 많은 부분을 cover하는 경우에는, V-learning은 이익을 볼 수 있을것이라 예상.
- V-function만을 prime거나 다른 함수들을 가지고 조합하는 demonstration을 사용하는 것도 조사.
- 이 결과들은 정량적으로 Fig. 2와 동일:
- 만약 policy가 priming에 포함되어 있다면, learning traces는 b), d)와 같고 다른 경우는 a), c)
- 다시말하지만, 이것은 전체적으로 놀라운 결과는 아니다.
- V-function을 근사시키는 것은 단순히 \(\pi, f\)에 관한 supervised learning이 아닌, (2)(consistency equation)의 validity(타당성)를 확인하기 위한 iterative 절차를 요구하고 복잡한 nonstationary funtion approximation 과정에 해당.
- Demonstration으로부터 data가 제한되면, 일반적으로 좋은 value function을 근사는 불가능.
- 이 결과들은 정량적으로 Fig. 2와 동일:
Model-Based V-Learning
- model f 를 학습하는 것은, 이를 더욱 강력하게 사용가능.
- certainty equivalence의 원리에 따르면, f 는 real world를 대체할 수 있고 real world와 interaction대신에 “mental simulations”에서 planning이 동작될 수 있음.
- RL에서, 이 idea는 원래 discrete state-action space에 대한 Sutton’s(1990) DYNA 알고리즘에 의해 제안.
- 여기서 DYNA, DYNA-CTD의 continuous 버전이 얼마나 learning from demonstration에서 도움이 될 수 있는지를 탐구(explore)할 것.
- Section 2.1.1(V-Learning)에서 CTD와 비교하여 얻은 유일한 차이점은 모든 real trial 이후에, DYNA-CTD는 지금까지 획득한 dynamics 모델이 실제 pole dynamics를 대체하는 다섯 번의 “mental trials”을 수행.
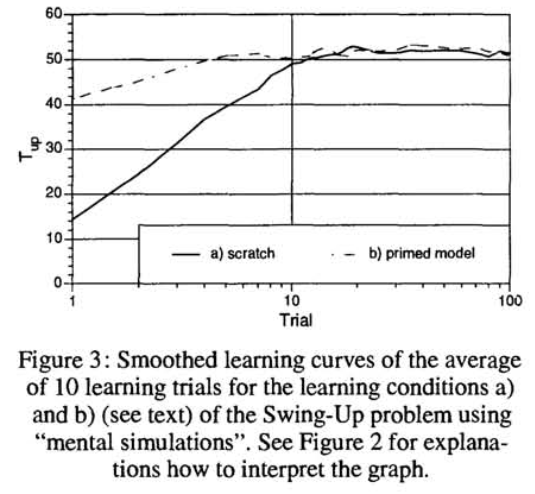
- 두 개의 learning conditions:
- Scratch: 처음부터 V, model f, policy \(\pi\)의 trial by trial learning.
- Primed Model: demonstraion으로부터 f 의 초기 training 이후, trial by trial learning.
- Fig. 3.는 이전 section에서 V-learning과 대조적.
- Learning from demonstraion은 상당한 차이를 보임
- Stable balancing을 가지는 좋은 swing-up을 성취하기 위해서는 단지 demonstration 이후 2-3 trial만 필요, \(T_{up}\) > 45s.
- Learning from demonstraion은 상당한 차이를 보임
Note that
처음부터 학습하는 것도 Fig. 2.보다 상당히 빠름.
The Nonlinear task: CART-POLE BALANCING
- Swing-Up task에 대한 demonstration으로부터 RL를 적용하는 것은 시기상조.
- Nonlinear function approximation을 가진 RL은 아직 적절한게 없음(yet to obtain appropriate scientific understanding).
- 따라서, 이 section에서 좀 더 쉬운 task(cart-pole balancer)로 변경.
- 이 task는 pole이 upright position에 가까울 때, approximately linear.
- 이 문제는 LQR(Dyer & McReynolds, 1970)의 맥락에서 DP literature에서 잘 연구됨.
Q-Learning
- V-learning과 대조적으로, Q-learning(Watkins, 1989; Singh & Sutton, 1996)은 value function보다 더욱 복잡, Q(x, u), state 및 command(input)에 의존.
- consistency equation (2)와 유사한 Q-learning:
- 매 state x 마다, reward function (1)하에서 optimal action이고 Q를 최소화하는 action u 를 선택.
- 장점: optimal policy를 찾기 위해 Q-function을 평가하는 것은 제어할 대상의 dynamical system f 를 요구하지 않음;
- 오직 one-step reward r 의 값만 필요
- Demonstration에서 learning하기 위해서는, Q-function and/or policy를 priming하는 것은 learning을 가속화하는 두 개의 후보이다.
- 장점: optimal policy를 찾기 위해 Q-function을 평가하는 것은 제어할 대상의 dynamical system f 를 요구하지 않음;
- LQR 문제는 Bradtke (1993)가 policy를 추출한 것을 기반으로하는 demonstration에서 이상적으로 학습에 적합한 Q-learning 방법을 제안.
- LQR에 대해 Q-function이 state 및 commands(input)이 quadratic인 것을 관측.
- Gain matrix K 로 표현되는 (linear) policy는 (4) 에서 (5) 와 같은 추출 할 수 있다.

반대로, stabilizing initial policy \(K_{demo}\) 가 주어지면, 현재 Q-function은 recursive least squares procedure에 의해 근사 되고 수렴성이 보장되는 (Bradkte, 1993) policy iteration 과정에 의해 최적화.
corresponding obseved states x 에 대한 observed command u 를 linearly regressing함으로서 초기 policy \(K_{demo}\) 를 추출 하도록 demonstration이 허용하기에, pole balancing의 one-shot learning을 성취하는 것.
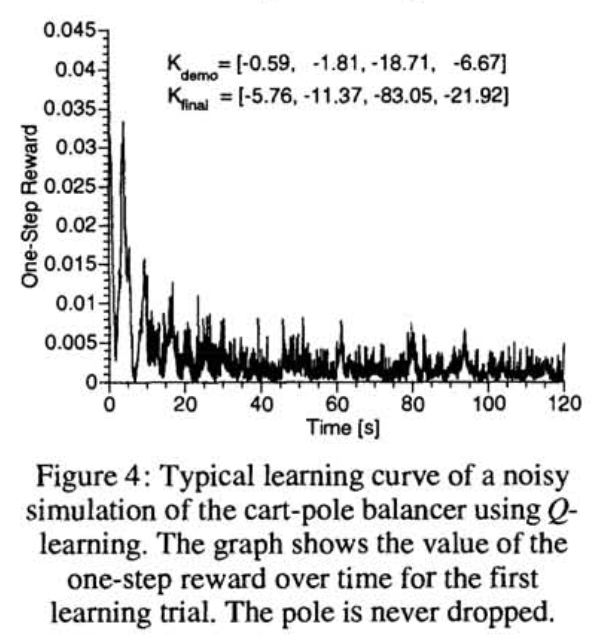
- Fig. 4.를 보면, 120초 정도 후(12 policy iteration step)에, policy는 기본적으로 optimal policy와 기본적으로 구별 불가
- 그러나, Q-learning의 주의사항은 stabilizing initial policy없이 학습불가
Model-based V-Learning
- V-function을 학습 하여 LQR task를 학습 하는 것: DP(Dyer&)의 classic form 중의 하나.
- Stabilizing initial policy \(K_{demo}\) 를 사용하여, 현재 V-function 은 Bradtke (1993)과 유사하게 recursive least square에 의해 근사.
- \(K_{demo}\) 와 유사하게, cart-pole dynamics의 (linear) model \(f_{demo}\) 은 cart-pole state x(t)의 linear regression에 의해 demonstration에서 추출 vs. 이전 state 및 command vector (x(t-1), u(t-1)), model은 학습 중에 경험하는 매번 새로운 data point을 가지고 정제될 수 있음.
- Policy update:

- 따라서, Bradtke(1993)와 같이 유사한 과정은 optimal policy K를 찾기 위해 사용될 수 있고, system은 one shot learning을 성취하며, Fig. 4와같이 정량적으로 구별 불가.
V-learning, Q-learning과 다르게 model이 필요, \(f_demo\) = [A B]
- Section 2.1.2 (이전 Model-Based V-Learning)에서 지적했던 것처럼, mental simulation을 수행함으로써 학습된 모델을 더욱 효율적으로 사용하도록 만듬.
- model \(f_{demo}\)이 주어지면, policy K은 H의 초기 추정치로부터 off-line policy iteration에의해 계산 할 수 있고, e.g., identity matrix (Dyer & McReynolds, 1970)로 취해짐.
- 따라서, initial (stabilizing) policy가 요구되지않고, task dynamics의 추정치를 요구.
- 또한, 이 방법은 one shot learning을 성취.
Pole balacing with an Actual Robot
- 이전 section의 결과로서, LQR 문제들에 대해 model-based V-learning 및 V-learning, Q-learning간의 실제 성능 차이는 없는 것 같음
- 더욱 realistic framework에서 이러한 방법들의 유용성을 검증하기 위해서, anthropomorphic robot arm에서 pole balancing의 demonstration에서의 learning을 구현
- Robot은 60Hz video-based stereo vision 장착.
- Pole은 real-time으로 track할 수 있도록 두 color blob들로 표기.
- 두개의 전면 카메라를 세우고 human에 의해 pole balancing의 30초 long demonstration이 제공.
- 더욱 realistic framework에서 이러한 방법들의 유용성을 검증하기 위해서, anthropomorphic robot arm에서 pole balancing의 demonstration에서의 learning을 구현
- Simulation과 비교하여 몇가지 중요한 차이점:
- demonstration이 vision-based이므로, kinematic 변수들만 demonstration에서 추출할 수 있다.
- visual signal processing은 120ms의 시간지연을 가진다.
- robot에 주어진 command는 로봇의 unknown nonlinearities때문에 높은 정확도를 가지는 execution은 아니다.
- human은 pole balancing에 대해 internal state를 사용한다
- 즉, human policy는 부분적으로 non-observable variables을 부분적으로 기반한다.
- 위와 같은 issue들은 다음과 같은 영향을 가진다:
- Kinematic Variable:
- 구현은 robot arm은 Cart-Pole problem의 cart로 대체.
- Arm의 inverse dynamics, inverse kinematics의 추정치를 가지므로, Cartesian 공간에서 task에 command input으로 finger의 가속도 사용 가능.
- Arm은 또한 pole보다 훨씬 무거워, pole이 arm에 발휘하는 interaction force를 무시함.
- 따라서, Fig. 1b의 pole balancing dynamics는 (7) 와 같이 reformulation
- Equation에서 모든 변수들은 demonstration에서 추출 가능.
- 이러한 방정식의 extension은 생략.
- Delayed Visual Information:
- Delayed vaeiables를 다루는 두 가지 방법:
- \(1\). Sytem의 state에 7*1/60s = 120 delay time, \(x^T = (x, \dot{x}, \theta, \dot{\theta}, u_{t-1}, u_{t-2}, ..., u_{t-7}\), 와 일치하는 delayed commands을 augmentation
- \(2\). state predictive controller를 employ하는 방법.
- 첫 번째 방법은 policy의 complexity를 상당히 증가, 두번째 방법은 model _f_를 요구.
- Delayed vaeiables를 다루는 두 가지 방법:
- Inaccuracies of Command Execution:
- 가속도 명령 u 가 주어지면, 로봇은 u 에 가깝게 실행하지만 정확한 u 는 아님.
- 따라서, u 를 포함한 function을 학습하는 것(e.g., dynamics model)은 위험할 수 있으며, 이유는 mapping \((x, \dot{x}, \theta, \dot{\theta}, u) \rightarrow (\ddot{x}, \ddot{\theta})\) 이 robot arm의 nonlinear dynamics에 의해 contaminated(오염)되기 때문이다.
- 게다가, 이러한 model을 믿을만하게(reliably) 학습할 수 없다고 밝혀졌다.
- 이것은 command u 를 “관측(observing)”하여 개선(remedied)될 수 있다
- 즉, visual feedback으로부터 \(u = \ddot{x}\)을 추출.
- Internal State:
- Human은 pole balancing에서 internal state 사용.
- 따라서, policy는 Section 2.2(THE LINEAR TASK: CART-POLE BALANCING)에서 주장했듯이 더욱 쉽게 관측될 수 없다
- Teacher의 policy를 추출하기 위한 regression analysis는 현재 state 및 과거 command(s)의 적절한 time-alignment를 찾아야만 한다.
- Delayed commands에 기반한 policy를 regressing이 singular regression 행렬들에 의해 위험(endanger)해지게되면, 수치적으로 관련된 과정이 될 수 있다.
- 결과적으로, Section 2.2에서 설명했듯이 Q-learning, V-learning의 응용을 막아버리는, demonstration에서 nonstabilizing policy를 추출하는 것은 쉽게 일어 난다.
- policy를 추출할때 방해요소는 쉽게 발생
이러한 고려사항의 결과는, demonstration에서 추출하기 하는 가장 믿을만한 요소는 pole dynamics의 model .
- 저자의 구현에서는, (6, Model-based V-learnign)와 같이 policy를 계산하기 위해서 사용되는 두가지 방법이 있고, visual information processing에서 delay를 극복하기 위해 Kalman filter를 가지고 state-predictive control을 사용.
- model은 RFWR(Schaal & Atkeson 1996)의 구현으로 real-time으로 점진적으로 학습
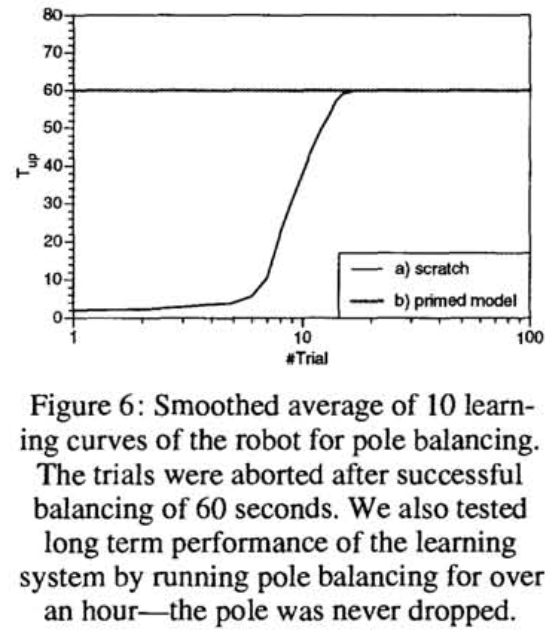
- Fig. 6은 실제 로봇의 demonstration에서의 학습과 처음부터 학습의 결과를 보여줌.
- Demonstration이 없다면, 1분이상 지속하는 학습은 10-20 trial이 소요.
- 30초 long demonstarion을 가지면, 학습은 one single trial로 믿을만하게 성취
- 다양한 사람의 demonstration들을 사용하고 다양한 pole을 사용.
Conclusion
- Q-learning, V-learning, model vased RL에 초점을 맞춘, RL 맥락에서 learning from demonstration을 다뤘다.
- World의 predictive model을 추출, Q/Value function을 prime하여 demonstration data를 사용, policy를 추출하여 demonstraion에서 Q-learning 및 value function learning은 이론적으로 이득을 봄.
- 그러나, LQR 문제의 special case에서만 demonstration으로부터 learner를 priming하는 상당한 이익을 찾음.
- 대조적으로, model-based RL은 “mental simulations”에 대해 world의 predictive model을 사용하여 demonstration으로부터 많은 이득을 취할 수 있었다.
- Anthropomorphic robot arm 구현에서, LQR 문제에서 구현
- MBRL은 Q-learning, value fucntion learning보다 실제 learning 시스템에서 complexity에 대해 더욱이 robust함을 제공
- Model based 방법을 사용하여 single trial에서 demonstration에서 로봇이 pole-balancing을 매우 좋은 reliability을 가지고 학습
- 이 논문에서 가장 중요한 것은 모든 학습 접근방법이 동등하게 knowledge를 transfer and/or biases의 결합이 동등하게 적용되지 않는다는 것
[Exploiting Model Uncertainty Estimates for Safe Dynamic Control Learning, Jeff G. Schneider, 1997]
Abstract
- DP와 결합한 model learning 은 continuous state dynamic system의 control을 학습하는데 효과적.
- 가장 단순한 방법은 학습된 model이 정확하다 가정하고 DP에 적용, 그러나 많은 approximator들은 fitting하는데에 불확실한 추정치를 제공.
- 어떻게 exploit될까?
- 이 논문은 system이 학습하는 동안 재앙과 같은 실패를 가지는 것을 막기 위한 case에 대해 다룸.
- 저자는 dual control literature를 개조(adapt)하여 새로운 알고리즘을 제안하고 DP를 가지고 Bayesian locally weighted regression model을 사용
- 일반적인 RL 가정은 공격적인(aggressive) 탐험(exploration)이 되기를 장려한다.
- 이 논문은 system이 exploration 해야하는 것의 반대(converse) 경우를 다룸
- 알고리즘은 4차원 simulated 제어 문제에서 구현.
Introduction
- RL 및 관련 grid-based DP 기술은 지속적으로 continuous 값을 가지는 state space를 가지는 dynamic system에 점차 적용 이 되고 있음(1997 년도).
- 1997 년도까지의 연구 결과:
- [Gordon, 1995] Value(or cost-to-go) 함수를 표현하기 위해 다양한 interpolation을 사용하여 continuous 값을 가지는 state spaces에 RL을 적용하여 완전한(sound) 이론적 근거를 가지는 DP 방법의 수렴성 증명.
- 이러한 방법(continous 문제의 수렴성 증명)들은 산업 학습 및 제어 문제에 응용을 향하기 위한 중요한 과정.
- [Sutton, 1990, Moore and Atkeson, 1993, Schaal and Atkeson, 1993, Davies, 1996] system을 구동한 data가 model을 build하기 위해 사용할 때, data 및 계산적 효율성에서 상단한 이익이 있다는 것이 보고됨.
- (Q-learning이 하는 것과 같이) 단일 value function update를 위해 한번 진행하고 버리는 방법 = 비효율적.
- DP sweeps은 off-line 혹은 on-line으로 학습된 모델에서 수행될 수 있다.
- Vanilla 형식에서, 이 방법은 model이 정학하다 가정하고 model을 사용하여 deterministric DP를 수행.
- 이 가정이 종종 정확하지 않음, 특히 학습의 초반 구간.
- 시뮬레이션 혹은 software 시스템을 학습할 때, 이 가정이 성립하지 않는다는 사실(model 정확)은 아무런 해가 없을 수도 있으나, 실제에서 physical 시스템은 실제로 catastrophic state이고 학습하는 동안에는 이를 피해야만 함.
- 더 나쁜 것은, 학습이 시스템의 정상 동작중에 발생해야만 하면 이는 학습 동안의 성능이 상당히 저하되지 않아야 한다.
- [Gordon, 1995] Value(or cost-to-go) 함수를 표현하기 위해 다양한 interpolation을 사용하여 continuous 값을 가지는 state spaces에 RL을 적용하여 완전한(sound) 이론적 근거를 가지는 DP 방법의 수렴성 증명.
- 1997 년도까지의 연구 결과:
- Adaptive, optimal linear control이론 자료는 이 문제는 상당히 stochastic, dual control이라는 이름으로 살펴보고 있다.
- [Kendrick, 1981, Bar-Shalon and Tse, 1976] 에서 살펴볼 수 있음.
- 제어 의사 결정(control decision)은 deterministic, cautionary, probing 용어 들에 기반
- Deterministic term: 모델이 완벽하고 best performance에 대해 control한다 가정
- 모델이 부정확하면 망함
- Cautionary term: model에 uncertainty를 고려하는 controller를 생성하고 최적이라 기대하는 성능(best expected performance)에 대해 control 선택.
- 시스템이 동작중에 system이 학습한다면, model에 대한 좋은 data를 얻기 위해 suboptimal and/or risky인 control들을 선택하는 것이 현명할 수도 있으며 궁극적으로 더 좋은 long-term 성능을 얻을 수 있음.
- Probing(exploration) term: best long-term 성능을 생성하는 controller를 제공.
- Deterministic term: 모델이 완벽하고 best performance에 대해 control한다 가정
- Dual Control의 장점: strong 수학적 기반으로 system, model, noise, performance criterion에 대한 몇 가지 가정하에서 optimal learning controller를 제공.
- RL와 같은 DP 방법 은 system이나 performance measure의 형태에 대한 강한(strong) 가정들을 만들지 않는 장점.
- [Atkeson, 1995, Atkeson, 1993]: caution, probing 이 포함된 global linear control을 사용한 기술을 제안했으며, local case에서도 응용 가능.
- 저자의 논문은 Bayesian locally weighted regrtession model의 사용을 통해 dual control으로부터 cautionary 개념을 가지고 grid based dynamic programming을 결한한 알고리즘 제안
- 저자의 알고리즘은 산업 제어 응용을 염두에 두고 설계
- 전형적인 시나리오는 생산 라인이 지속적으로 동작된다는 것.
- 이러한 동작에서 이용가능한 data가 있지만, state space의 작은 영역만을 다룰 수 있기에 전체 동작하는 potential range에 걸쳐 정확한 모델을 생성하기 위해 사용되어 질 수 없음.
- Management는 set point 혹은 외란(disturbance)의 변화에 반응하는 line의 성능향상에 관심있지만, learning process 중에는 생산손실(loss of production)이 크면 안된다.
The Algorithm
- Dynamics \(x^{k+1} = f(x^k, u^k)\)로 구어진 system을 고려.
- state x, contron u, : real valued vectors.
- k : discrete time increments.
- f 의 model: \(\hat{f}\).
- Task는 form \(J = \sum^N _{k=0} L(x^k, u^k, k)\) subject to the system dynamics 의 cost functional 최소화.
- N: 문제에 따라 fixed 일수 있고 아닐 수도 있음.
- L은 주어지고, f은 학습해야함.
- 목표: 학습 도중에 큰 손해 발생(incurring huge penalties)없이 J 를 최소화하기 위해 f 를 학습하기 위해 data를 얻는 것.
- Cost function이 catastrophic states를 정의한다는 implicit 가정 존재.
- 만약 피해야하는 disaster가 없다면, 단순하고 더욱 aggressive 알고리즘이 저자가 제안한 알고리즘보다 성능이 좋을 것.
- Top level 알고리즘:
- 기존 controller로부터 system을 구동하는 도중에 data 획득.
- Baysian locally weighted regression 사용하여 data로부터 model 구축
- Value function, policy를 계산하기위해 model를 가지고 DP 수행
- 새로운 policy를 사용하여 system 구동하고 추가 data 확보.
- 성능 향상하는 동안 step 2 반복
Steps 2, 3 설명은 나머지 section에서 진행.
Bayesian locally weighted regression
- 저자는 data로부터 model을 build하기 위해서 Baysesian locally weighted regression[Moore and Schneider, 1995]이라 불리는 locally weighted regression [Cleveland and Delvin, 1988, Atkeson, 1989, Moore, 1992] 의 형태를 사용.
- Query, \(x_q\)가 만들어 질 때, 저장된 data points의 각각은 weight \(w_i = exp( - \left \| x_i - x_q \right \| ^2 /K)\) 을 수신
- K : regression에서 localness의 양을 제어하는 kernel width
- Bayesian LWE에 대해 저자는 regression model의 계수 및 noise covariance에 대해 wide, weak normal gamma를 먼저 가정.
prediciton의 결과는 output에 대한 distribution이고, output은 data의 없어도 잘 정의됨 (see [Moore and Schneider, 1995] and [DeGroot, 1970] for details)
- Data가 없는 regions에서의 prediction의 distribution은 DP 알고리즘의 performance에 중요.
- Search 및 실험(experimentation)을 통해학습하는 경우가 많기 때문에, 얼마나 data가 많은 region에서 interpolate하는 것만큼이나 data가 없을 때 무지(own ignorance)를 fucntion approximator가 예상하는 것도 중요.