Robot kinematocs is concerned with the establishment of various coordinate systems to represent the positions and orientations of rigid objects and with transformations among these coordinate frames.
Homogeneous transformations combine the operations of rotation and translation into single matrix multiplication and this is used to derive the forward kinematic equation.
i.e., Expression of the transformation about relationship of position and orientation.
Representing Positions
In robotics, it is necessary to specify a coordinate frame in order to assign coordinates of a point.
While a point correspond to a specific location in space, a vector specifies a direction and a magnitude.
Orientation matrix that specifies the coordinate vectors for the axes of frame \(o_1 x_1 y_1\) wutg respect to coordinate frame \(o_0 x_0 y_0\). \(\begin{aligned} R ^0 _1 &= \begin{bmatrix} x^0_1 & y^0 _1 \end{bmatrix} &= \begin{bmatrix} cos \theta & - sin \theta \\ sin \theta & cos \theta \end{bmatrix} \end{aligned}\)
Alternative approach using the dot product of two unit vectors
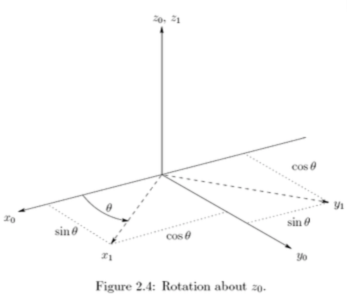
Suppose the frame \(o_1 x_1 y_1 z_1\) is rotated through an angle about the \(z_0\) axis, and it is desired to find the resulting transformation matrix \(R^0_1\).
Note that by convention the positive sense for the angle is given by the right hand rule;
That is, a positive rotation of degrees about the z-axis would advance a right-hand threaded screw along the positive z-axis.
\[\begin{aligned} & x_1 \cdot x_0 = cos \theta & y_1 \cdot x_0 = - sin \theta \\ & x_1 \cdot x_0 = cos \theta & y _1 \cdot x_0 = - sin \theta\\ & z_0 \cdot z_1 = 1 \end{aligned}\]
Thus,
\[\begin{aligned} R^0_1 &= \begin{bmatrix} cos \theta & - sin \theta & 0 \\ sin \theta & cos \theta & 0 \\ 0 & 0 & 1 \\ \end{bmatrix} \in SO(3) \end{aligned}\]
The Basic Rotation matrices
\[\begin{aligned} R_{z, \theta} &= \begin{bmatrix} cos \theta & - sin \theta & 0 \\ sin \theta & cos \theta & 0 \\ 0 & 0 & 1 \\ \end{bmatrix}, R_{x, \theta} = \begin{bmatrix} 1 & 0 & 0 \\ 0 & cos \theta & - sin \theta \\ 0 & sin \theta & cos \theta \\ \end{bmatrix} R_{y, \theta} = \begin{bmatrix} cos \theta & 0 & sin \theta \\ 0 & 1 & 0 \\ - sin \theta & 0 & cos \theta \\ \end{bmatrix} \end{aligned}\] \[\begin{aligned} & R_{z, 0} = I \\ & R_{z, \theta} R_{z, \phi} = R_{z, \theta+\phi} \\ & R^{-1}_{z, \theta} = R_{z, -\theta} \end{aligned}\]
Rotational Transformations
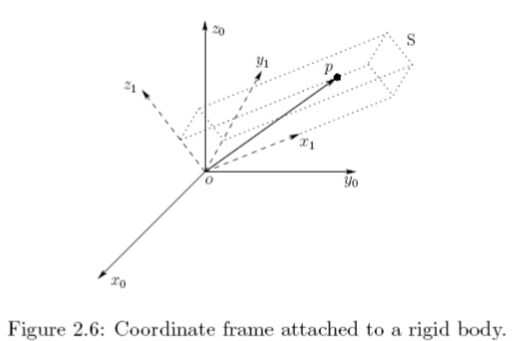
We wish to determine the coordinates of p relative to a fixed reference frame \(o_0 x_0 y_0 z_0\).
\[\begin{aligned} & p = ux_1 + vy_1 + wz_1 \end{aligned}\]
Projection onto the coordinate axes of the frame \(o_0 x_0 y_0 z_0\).
Project the vector \(p\) onto each axis of reference frame \(o\).
\[\begin{aligned} p^0 &= \begin{bmatrix} p \cdot x_0\\ p \cdot y_0\\ p \cdot z_0 \\ \end{bmatrix} \end{aligned}\]
The rotation matrix can be used not only to present the orientation of coordinate frame \(o_1 x_1 y_1 z_1\) with respect to frame \(o_0 x_0 y_0 z_0\), but also to transform the coordinates of a point from one frame to another.
Composition of Rotations
Rotation with respect to the current coordinate frame
Suppose we now add a third coordinate frame \(o_2 x_2 y_2 z_2\) related to the frames \(o_0 x_0 y_0 z_0\) and \(o_1 x_1 y_1 z_1\) by rotational transformations.
Suppose initially that all 3 of the coordinate frames coincide.
We first rotate the frame \(o_1 x_1 y_1 z_1\) related to \(o_0 x_0 y_0 z_0\) according to the transformation \(R ^1 _2\).
Then, with the frame \(o_1 x_1 y_1 z_1\) and \(o_2 x_2 y_2 z_2\) coincident, we rotate \(o_2 x_2 y_2 z_2\) relative \(o_1 x_1 y_1 z_1\) to according to the transformation \(R ^1 _2\).
In each case, rotation occurs with respect to the current frame.
Note:
It is important to remember that the order in which a sequence of rotations are carried out is crucial. Rotation matix has difference results according to the order of sequence of roation.
Rotation with respect to the fixed coordinate frame
Many times it is desirable to perform a sequence of rotations, each about a given fixed coordinate frame, rather than about successive current frames.
Parameterization of Rotations
Three ways in which an arbitrary rotation can be represented using only three independent quantities:
Euler Angle representation
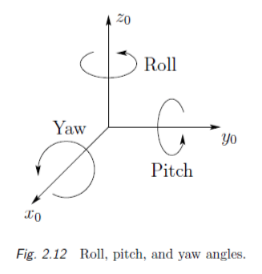
Roll-Pitch-Yaw representation
Axis/angle representation
Euler Angles
A common method of specifying a rotation matrix.
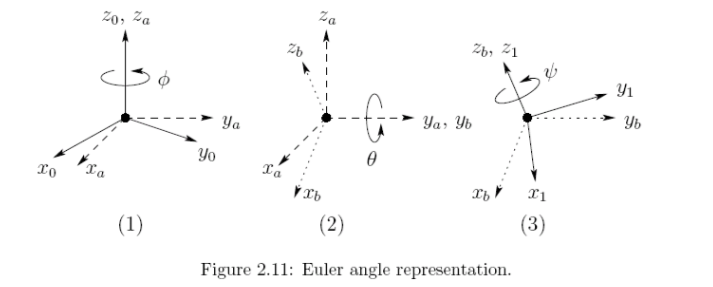
We can specify the orientation of the frame \(o_1 x_1 y_1 z_1\) relative to the frame \(o_0 x_0 y_0 z_0\) by three angles \((\phi, \theta, \psi )\) , known as Euler Angles.
Procedure
Rotation about the z-axis by the angle \(\phi\)
Rotation about the current y-axis by the angle \(\theta\)
Rotation about the current z-axis by the angle \(\psi\).
Note
Actually, the order of sequence can be defined according to diverse type, but z-y-z is the common order of sequence.
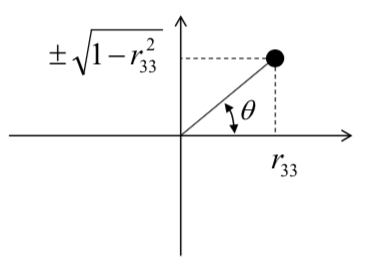
If not both \(r_{13}\) and \(r_{23}\) are not zero, \(s_{\theta} \neq 0 \rightarrow\) hence, not both \(r_{31}\) and \(r_{32}\) are zero, \(r_{33} \neq \pm 1. \rightarrow\)
if \(\theta = \pm \frac{\pi}{2}\), no there exist a unique solution.
Generally, we assume that \(-\frac{\pi}{2 } < \theta < \frac{\pi}{2}\).
Homogeneous Transformations
In this section, we combine position(translation) and orientation to define homogeneous transformations.
If frame \(o_1 x_1 y_1 z_1\) is obtained from frame \(o_0 x_0 y_0 z_0\) by first applying a rotation specified by \(R^0_1\) followed by a translation given (with respect to \(o_0 x_0 y_0 z_0\)) by \(d^0_1\) , then the coordinates \(p^0\) are given by